Solving Cameras
When you’re happy with the features that you’ve tracked, you can solve the camera position. C_Tracker uses the tracking information to calculate the camera position, which is used for stabilizing or match-moving.
| 1. | In the C_Tracker Properties panel, click the Solve Using dropdown and select the type of tracking data to use. If you created auto-tracks and then added some manual tracks as well, select Combined. |
| 2. | Click Solve. |
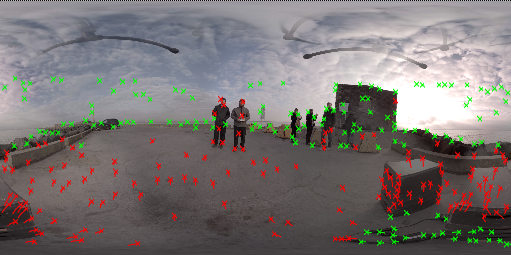
When the solve is complete, the Viewer displays the tracked features with solve data applied. Green features represent good solve data and red features represent poor solve data.
The Solve Error is good indicator of the overall quality of the solve. If the RMS (root mean square) error is quite high, consider refining your tracking data or adding some User Tracks and Solving the camera again. See Troubleshooting Auto-Tracks and Manual Tracking for more information.
| 3. | If too many tracks are rejected by the solve, try increasing the Error Threshold or refining the solve using the Solve controls on the Settings tab. See Troubleshooting Solves for more information. |
When you're happy with the solve, you can use the transform data for stabilizing or match-moving. See Stabilizing Using C_Tracker for more information.