Search is based on keyword.
Ex: "Procedures"
Do not search with natural language
Ex: "How do I write a new procedure?"
Contact Support
Stitching Nodes
The Stitching nodes take care of the process of aligning your camera rig output and joining the separate images into a single, cohesive frame. You can also perform some optional global colour corrections at this stage.
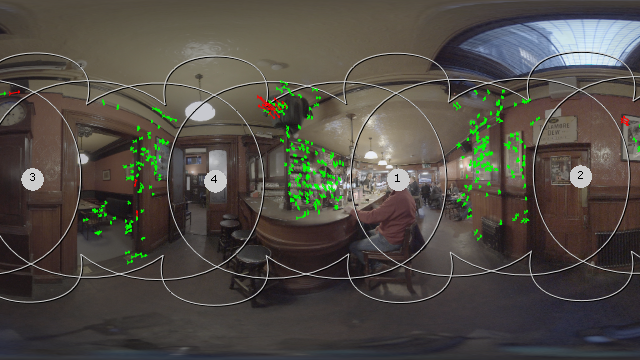
C_CameraSolver calculates the geometry for the multi-camera rig. This defines the location and orientation for each camera so that the images can be stitched.

C_Stitcher automatically generates a spherical lat-long by warping and blending between the different input images. See Stitching Images Together for more information.
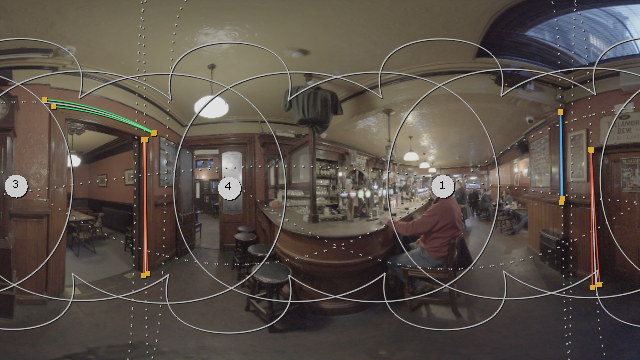
C_GlobalWarp is an optional step to produce a preview stitch using metadata, passed downstream from a C_CameraSolver, to help minimize ghosting in overlap regions.

C_ColourMatcher is an optional step to perform global gain-based colour correction for all the views in a rig to balance out differences in exposure and white balance.