Compositing Using Nokia OZO Data
CaraVR's Nokia OZO toolset allows you to quickly extract depth information from OZO metadata to construct point clouds for use with depth-dependent workflows. The depth data is particularly useful for positioning 3D elements accurately and then rendering into 2D through C_RayRender.
To set up the toolset:
| 1. | Navigate to CaraVR > Toolsets > Nokia_OZO_Depth_To_Points. |
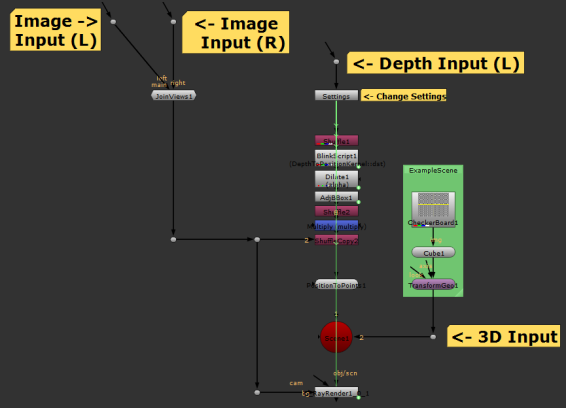
The preset node tree is added to the Node Graph.
| 2. | Nuke prompts you to create left and right views, if they don't exist in your script. |
| 3. | Connect the source images to the Image Inputs and the depth information to the Depth Input. |
Note: Ensure that the Depth Input Read colorspace is set to linear.
| 4. | Connect a Viewer to the depth Read node to view depth data. Darker areas are closer to the rig and brighter areas are farther away. |

In the example, the trees to the left of the image are in the background and the bear in the center is in the foreground.
| 5. | Attach a Viewer to the C_RayRender node to view the scene. |
The depth data and camera data are processed by a BlinkScript kernel, converted to a point cloud, and then passed into C_RayRender.
The default toolset adds a cube to the scene, using the injected data to position it accurately. You can swap out the example geometry to test other objects within the scene.

| 6. | You can also examine the scene in the 3D Viewer by pressing Tab. Navigate around the 360° scene using the standard Nuke navigation controls: Ctrl/Cmd to rotate the camera and Alt to pan. |


| 7. | Adjust the values in the Settings node to control the point cloud's appearance: |
• Cutoff - the depth in meters beyond which points are omitted from the point cloud. Reducing the value removes points farther from the rig.
• Dilate - points near the edges of the cut off depth can create artifacts. The Dilate control adjusts the alpha mask at the edges to help reduce these artifacts.