検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
クォータニオンモディファイヤ
四元数共役
のQuaternion Conjugate modifierは、クォータニオンの逆数を計算します。たとえば、入力クォータニオンにY軸で45度の回転が含まれている場合、出力クォータニオンにはY軸で-45度の回転が含まれます。
Input:共役する四元数。
Output:共役四元数を出力します。
軸-角度からの四元数
のQuaternion From Axis-Angle modifierは、任意の軸を中心とした回転をクォータニオンに変換します。

Axis:回転を実行する軸。
Angle:軸を中心に回転する回転角度。
Quaternion:結果を出力します。
オイラーからの四元数
のQuaternion From Euler modifierは、XYZ回転角度をクォータニオンに変換します。
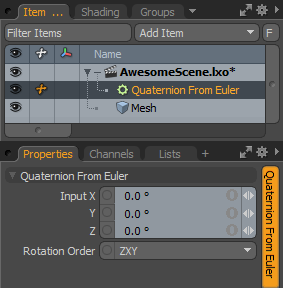
Input:変換するXYZ回転角度。
Rotation Order: 3つの軸を組み合わせるために使用される順序。オイラー回転は3つのジンバルを使用するため、回転の順序が重要です。たとえば、 Rotation Orderチャネルはに設定されていますZXY (デフォルト)、 Z他の軸に影響を与えることなく、最初に回転が実行されます。次に、 X軸が回転し、定義に使用される平面を変更しますZ軸。最後に、 Y軸が計算され、両方を定義するために使用される平面が変更されますXそしてZ。ほとんどの場合、この値はModoプロパティを変換します。
Quaternion:結果を出力します。
マトリックスからの四元数
のQuaternion From Matrix modifierは、回転行列を四元数に変換します。

Matrix:変換する回転マトリックス。
Quaternion:結果を出力します。
Quaternion Get Value
のQuaternion Get Value modifierは、四元数の値を表す4つのコンポーネントを返します。

Input:値を読み取るための入力クォータニオン。
Value:クォータニオンに格納されている最初の3つのコンポーネント。
Value W:クォータニオンに格納されている4番目のコンポーネント。
四元数の計算
のQuaternion Math modifierは、2つの四元数に対して単純に数学演算を実行します。 Add, Subtract, Multiply, or Divide。一部の操作では、クォータニオン入力が非可換であるため、スワッピングQuaternion AそしてQuaternion B周り、結果を変更します。これらの修飾子は、インターフェイスでは4つの個別の修飾子として表示されますが、実際には、複数の数学演算を持つ単一の修飾子です。

Quaternion A:数学演算に使用される最初の四元数。
Quaternion B:数学演算に使用される2番目の四元数。
Operation:実行する数学演算: Add、 Subtract 、 Multiply 、またはDivide。
Output:数学演算が実行された後の結果の四元数。
クォータニオン正規化
のQuaternion Normalize modifierは、クォータニオンを正規化して、大きさが1.0になるようにします。
Input:正規化する四元数。
Output:正規化された四元数。
クォータニオンセット値
のQuaternion Set Value modifierは、クォータニオンの値を表す4つのコンポーネントを設定します。

Value:クォータニオンに格納されている最初の3つのコンポーネントを設定するために使用される値。
Value W:クォータニオンに格納されている4番目のコンポーネントの設定に使用される値。
Output:結果の四元数。
クォータニオンスラープ
のQuaternion Slerp modifierは、2つのクォータニオン間で球形線形補間を実行し、1つのクォータニオンに格納された回転を別のクォータニオンに格納された回転にブレンドします。
Quaternion A:ブレンドする最初のクォータニオン値。
Quaternion B:ブレンドする2番目のクォータニオン値。
Blend Amount: 2つの四元数の間のブレンドの量。値0はクォータニオンAを返し、値100はクォータニオンBを返します。これらの2つの値の間の値は、2つのクォータニオン間の補間を返します。
Output:結果の四元数。
軸角度に対するクォータニオン
のQuaternion To Axis-Angle修飾子は、クォータニオンを任意の軸を中心とした回転に変換します。

Quaternion:軸角度に変換する四元数。
Axis:回転が実行される軸。
Angle:軸を中心に実行される回転角度。
クォータニオンからオイラーへ
のQuaternion To Euler modifierは、クォータニオンをXYZ回転角度に変換します。
Quaternion: XYZ回転角度に変換するクォータニオン。
Rotation Order: 3つの軸を組み合わせるために使用される順序。オイラー回転は3つのジンバルを使用するため、回転の順序が重要です。たとえば、 Rotation Orderチャネルはに設定されていますZXY (デフォルト)、 Z他の軸に影響を与えることなく、最初に回転が実行されます。次に、 X軸が回転し、定義に使用される平面を変更しますZ軸。最後に、 Y軸が計算され、両方を定義するために使用される平面が変更されますXそしてZ。ほとんどの場合、この値はModoプロパティを変換します。
Output:結果のXYZ回転角度。クォータニオンから変換されます。
クォータニオンからマトリックスへ
のQuaternion To Matrixクォータニオンを回転行列に変更します。

Quaternion:行列に変換する四元数。
Matrix:結果の回転行列を出力します。
クォータニオンベクトル乗算
のQuaternion Vector Multiply修飾子、ベクトルにクォータニオンを乗算します。これは基本的に、クォータニオンに保存されている角度で、クォータニオンに保存されている軸を中心にベクトルを回転させます。

Quaternion:ベクトルに乗算する四元数。
Input:クォータニオンで乗算する入力ベクトル。
Output:結果のベクトル。
役に立たなかったのでごめんなさい
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がございましたら、下のボタンを使用してドキュメントチームにメールでお問い合わせください。
フィードバックをお寄せいただきありがとうございます。