ヒンジ拘束
ヒンジコンストレイントは、オブジェクトの回転運動を、ドアのようにヒンジジョイントで固定されているかのように回転するように制限します。ただし、ドアヒンジは対向するヒンジプレートの衝突によって制限されるため、ヒンジ拘束は、ホイールアクスルのように無制限に回転できます。ジョイントに回転範囲制限を追加して、ドアヒンジのより制限されたモーションを生成できます。ヒンジコンストレイントは、ビューポートでは回転点を中心とする円として表されます。さらに、モーターの力をジョイントに適用して、アイテムを回転させて前方に動かすホイールを作成することができます。
ヒンジ拘束を自動的に適用するには、次の手順に従います。
| 1. | 制約タイプを呼び出す前に、2つのアイテムを選択します。 |
選択された最初のアイテムはマスターまたは親アイテムを表し、次のように定義されますBody A制約では、2番目に選択されたアイテムは制約されたアイテムであり、補助アイテムまたは子アイテムとも見なされ、次のように定義されます。 Body B。
| 2. | アイテムを選択した状態で、 Dynamicsサブタブで、 Hinge制約ボタン。 |
これにより、制約アイテムがItemsリスト。
ヒンジコンストレイントのデフォルトの中心位置は、 Body AそしてBody B制約されたアイテムの中心に線を引くオブジェクト。意図によっては、これが制約の最適な位置ではない場合があります。子アイテムの動き(Body B)は、制約アイテム自体の位置から発生するため、適切に配置する必要がある場合があります。
|
オプション |
説明文 |
|---|---|
|
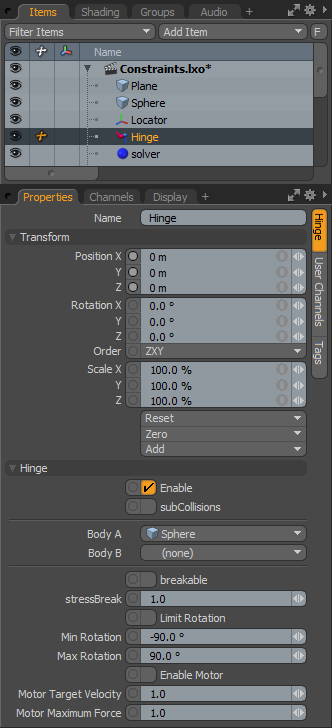
Name |
現在の制約項目名を表示します。変更するには、フィールドをクリックして新しい名前を入力します。 |
|
Transform |
|
|
Position X/Y/Z |
これらの値は、3Dワールド空間でのコンストレイントアイテムの初期中心と、コンストレイントしているアイテムを基準とした重心を表します。初期位置に基づいて、ダイナミクスシミュレーションが呼び出されると、拘束アイテムは初期(静止)位置に基づいて回転および移動します。 |
|
Rotation X/Y/Z |
これらの値は、拘束アイテムの初期(静止)回転を表します。 |
|
Scale X/Y/Z |
これらの値は、制約には直接影響しません。 |
|
Hinge |
|
|
Enable |
制約項目のオンとオフを切り替えます。有効にすると、ダイナミクスシミュレーション中に制約項目が考慮されます。無効にすると、制約項目は無視されます。ただし、無効化された制約は、 Modoセッション、シーンと一緒に保存され、現在の設定を保持します。 |
|
SubCollisions |
有効にすると、制約されたオブジェクト(特に、リテラルチェーンではなくチェーン内のオブジェクトではなく、後続のグループ化)が互いに衝突できるようになります。無効にした場合(デフォルトの状態)、必要な計算は少なくなりますが、制約されたアイテムが相互に貫通する可能性があります。これが発生した場合は、 SubCollisions。 |
|
Body A |
別のアイテムが制約されているアイテム、つまり親アイテムまたはマスターアイテムを表します。 |
|
Body B |
制約されているアイテム、子アイテムまたは補助アイテムを表します。 |
|
Breakable |
特定のストレスしきい値に達したときに制約を分解できるようにします。 Break Stress値。しきい値に達すると、拘束は拘束されたアイテムに影響を与えなくなり、シミュレーションに存在する他の力の影響を受けます。 |
|
Stress Break |
制約が制約されたアイテムに影響しなくなったときのしきい値を決定します。のBreakableこの値が制約に影響を与えるには、オプションを有効にする必要があります。 |
|
Limit Rotation |
ヒンジの回転は、最初は制限されていません。このオプションを有効にすることで、これまでスイングすることしかできなかったドアヒンジの動きと同様に、拘束に適用できる回転の範囲を拘束できます。 |
|
Min/Max Rotation Limit |
のMinimum値は回転クランプの下限を設定し、 Maximum valueは極値の上限を制限します。 |
|
Enable Motor |
通常、ヒンジはダイナミックシミュレーションで使用可能な力のみに影響されます。このトグルにより、回転力をBody Bアイテムは、ヒンジコンストレイントの位置を中心に回転します。回転の速度は、接続されたオブジェクトの質量によって制御され、 Motor Target VelocityそしてそのMotor Maximum Force。 |
|
Motor Target Velocity |
この値がゼロ以外の場合、回転運動をBody B項目。ホイールのように、正の値はアイテムを前に回転させ、負の値はアイテムを逆に回転させます。動きの方向は、拘束の初期位置に基づいています。モーターは、力、質量、および発生する衝突を考慮して、定義された目標速度を達成しようとします。 |
|
Motor Maximum Force |
モーターが目標速度に到達する強さ、および衝突アイテムにどのように反応するかを決定します。 |
役に立たなかったのでごめんなさい
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がございましたら、下のボタンを使用してドキュメントチームにメールでお問い合わせください。
Email Docs Teamフィードバックをお寄せいただきありがとうございます。
