検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
SphericalTransformによる変換と投影
SphericalTransformは、360作業を含むさまざまな投影間で画像を変換し、Blink GPUアクセラレーションを利用します。これらのビューの投影は、2つの大まかなカテゴリに分類できます。
• 次のようなフルフレームLatlong、単一のポイントを中心に360の世界全体を網羅し、
• などの部分的なフレームRectilinearそれを見るNukeで動作するように設計されました。
SphericalTransformノードは共通に使用できますNuke回転、コンピング、トラッキングなどの360素材の操作。SphericalTransformを使用すると、目的の変換の入力および出力投影を構成できます。部分フレーム投影の場合、追加の投影空間パラメーターがInputそしてOutput次のような特定のカメラパラメータのタブfocal length、 sensor size 、 等々。
回転コントロールを使用して調整しますInputそしてOutput単一のポイント管理からLook位置、2点行きFrom/To、 Pan/Tilt/Roll 、またはFull Rotation回転順序を制御する角度。
のOutput回転は、ビューア内制御システムを使用して制御することもできます。長押しCtrl/Cmd+Alt左クリックしてドラッグして画像を移動し、パンとチルトの設定を設定します。追加Shiftムーブメントの単一の次元にロックするため。部分的なフレーム投影では、マウスの右ボタンを使用して、 focal length、本質的にズームインとズームアウト。
SphericalTransformは、次の投影モード間で変換できます。
|
プロジェクション名 |
例 |
説明 |
|---|---|---|
|
ラットロング |
|
Latlong、または正距円筒図法は、最も一般的なフル360フレーム投影法です。多くのVRパイプラインは、シンプルで広く使用されているため、取り込みとエクスポートの両方に使用します。 緯度の長い空間での作業は、そのなじみのないマッピング、多くの圧縮技術が処理するように設計されていないこと、および多くのピクセルが出力の単一ピクセルを表す極に対する非効率性のために問題となります。 |
|
キューブマップ |
|
Cubemapプロジェクションは別のフル360プロジェクションです。6つの面のそれぞれは本質的に直線であるため、データは使い慣れたものになります。面はさまざまな方法でパックできます。 • Image -すべての顔は単一の画像に配置され、 Packingコントロール。デフォルトはLL-Cross例に示すように。 • Views -各面は、ストリーム内にビューを作成します。ビューには、次の規則を使用して名前が付けられます。 cubemap_<direction><axis> どこ<direction>することができますposまたはneg、正と負の場合、および<axis>することができますx 、 y 、またはz。 • Faces -各顔は別々の画像ストリームに配置されますが、 Nukeの制限により、このモードでは単一のフェイス出力のみが可能です。を使用して出力する面を選択できますFaceコントロール。 入力モードでは、6つの個別の入力を取得し、それらが表す面に従ってラベル付けされます。 |
|
直線的 |
|
Rectilinearプロジェクションは部分的なフレームであり、最もよく知られている標準のプロジェクションです。 ヒント: 直線に出入りするときは、フレームの一部しかカバーできないことを覚えておいてください(実質的に180度まで)。 部分的なフレーム投影として、これにより、 InputそしてOutputタブ(入力投影として選択したか、出力投影として選択したかによって異なります)。これらは、次のようなカメラパラメータを管理します。 focal length、 sensor sizeなどは、フルフレーム投影には適用されません。 |
|
魚眼レンズ |
|
Fisheye魚眼レンズで使用される一般的な光学モデルをエミュレートするすべての投影をカバーしています。これらはすべて部分的なフレーム投影であるため、次のような特定のカメラパラメーターを有効にします。 Rectilinear投影タイプ。さらに、使用する特定のモデルを選択できます。 • Stereographic光学分野では広く使用されておらず、Samyang Opticsはそれを使用する数少ない企業の1つです。のStereographicモデルはlittle planet投影、投影の中心は最下点です。 SphericalTransformにはLittlePlanetプリセットされたプロパティ。水平方向の線が垂直方向に中央にある緯度経度にこのような外観を適用します。 • Equidistantはデフォルト設定であり、CaraVRのC_CameraSolverノードで使用される魚眼歪み推定で使用されるゼロ化モデルと一致します。 Equidistant応答はさまざまなモデルの曲線間のバランスであるため、多くの場合、理想的なモデルと見なされます。このレベルの制御を持たない他のツールは、おそらくこのモデルを使用します。 • Equisolidは、実際の光学で最も頻繁に見られるモデルです。 • Orthographicは、実際の光学系ではほとんど使用されない、古典的な「完全な」応答モデルです。ただし、次の魚眼モデルと一致します。 Nuke。 |
|
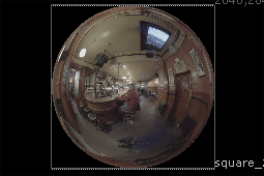
ミラーボール |
|
ミラーボールは、画像の±XYがフォーマットの端にくるように拡大された反射ボールの画像を生成します。 |




申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。