検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
PositionToPointsノードを使用した高密度ポイントクラウドの作成
PositionToPointsは、画像ファイル(3Dアプリケーションからレンダリングされた)に含まれる位置データを取得し、画像を濃い3D点群として再作成します。 Nuke。位置チャネルのx、y、およびz頂点は、3D空間のポイント位置を定義するために使用されます。サイズと数は、 point sizeそしてpoint detailコントロール。
PositionToPointsを使用して点群を作成するには
| 1. | から3D > Geometryメニュー、選択PositionToPointsスクリプトにノードを追加します。 |
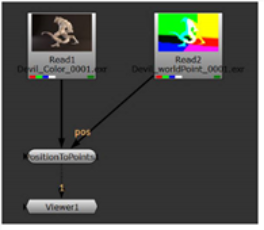
| 2. | 位置パスを読み取り、ノードに接続します。 |
個別の位置と通常の情報を含む複数の画像がある場合、それらを接続しますposそしてnormそれぞれ入力。
ことに注意してくださいposそしてnorm入力は、名前のない入力を接続すると表示されます。
|
|
| 法線はに含まれています ソース画像、 2番目の画像には 位置パス。 |
| 3. | から位置チャンネルを選択します surface pointドロップダウンメニュー。画像に通常のチャンネルが含まれている場合、これを選択します surface normalドロップダウンメニュー。これで、3Dビューアーに点群が表示されます。 |
を介してノードに個別の位置と通常の情報を提供した場合posそしてnorm入力、 surface pointそしてsurface normalドロップダウンは無効です。
| 4. | ポイントの数を変更するには、調整しますpoint detailスライダー。値0は、ポイントが表示されないことを意味します。値1は、使用可能なすべてのポイントを表示します。 |
| 5. | ポイントのサイズを変更するには、 point sizeスライダー。 |
|
|
| から作成された点群 PositionToPointsノード。 |

申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。