検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
Nokia OZOデータを使用した合成
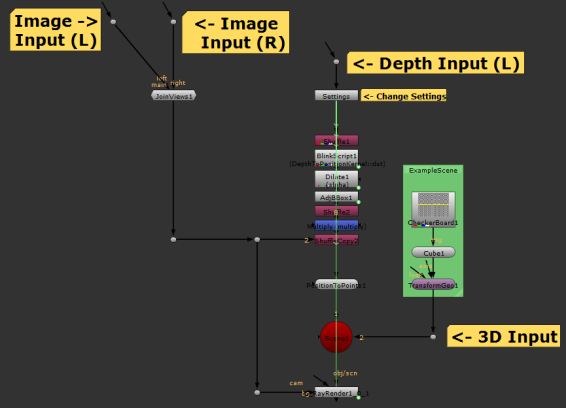
CaraVRのNokia OZOツールセットを使用すると、OZOメタデータから深度情報を迅速に抽出し、深度依存ワークフローで使用するポイントクラウドを構築できます。深度データは、3D要素を正確に配置し、RayRenderを介して2Dにレンダリングするのに特に役立ちます。
ツールセットを設定するには:
| 1. | 案内するCaraVR > Toolsets > Nokia_OZO_Depth_To_Points。 |
プリセットノードツリーがノードグラフに追加されます。
| 2. | Nukeスクリプトに存在しない場合、左右のビューを作成するように求められます。 |
| 3. | ソース画像をImage Inputs深さ情報Depth Input。 |
注意: 確実にDepth Input読んだcolorspaceに設定されていますlinear。
| 4. | 深度データを表示するには、ビューアを深度読み取りノードに接続します。暗い領域はリグに近く、明るい領域は遠くにあります。 |

この例では、画像の左側の木が背景にあり、中央のクマが前景にあります。
| 5. | ビューアーをRayRenderノードに接続して、シーンを表示します。 |
深度データとカメラデータはBlinkScriptカーネルによって処理され、ポイントクラウドに変換されてから、RayRenderに渡されます。
デフォルトのツールセットは、キューブをシーンに追加し、注入されたデータを使用してキューブを正確に配置します。サンプルジオメトリを交換して、シーン内の他のオブジェクトをテストできます。

| 6. | を押して、3Dビューアでシーンを調べることもできますTab。標準を使用して360°シーンをナビゲートしますNukeナビゲーションコントロール: Ctrl/Cmdカメラを回転させ、 Altパンする。 |


| 7. | [設定]ノードの値を調整して、点群の外観を制御します。 |
• Cutoff -ポイントクラウドからポイントが省略される深さ(メートル)。値を小さくすると、リグから遠く離れたポイントが削除されます。
• Dilate -カットオフ深度のエッジ近くのポイントは、アーティファクトを作成できます。のDilateこれらのアーティファクトを減らすために、コントロールはエッジのアルファマスクを調整します。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。