既存のカメラトラックの拡張
CameraTrackerを使用すると、新しいフレームを追加して、既存の追跡データセットを拡張できます。たとえば、撮影でさらに多くのフレームが使用可能になったときなどです。
注意: 解決する前に何度でも追跡データを更新できますが、カメラの位置を解決したら、追跡データの更新は比較的少数のフレームを追加するためにのみ使用してください。見る拡張追跡データを使用したソルブの更新詳細については。
追跡データに新しいフレームを追加するには:
| 1. | 新しいフレームを読み込みますNuke読み取りノードのframe rangeコントロール。 |
| 2. | CameraTrackerプロパティパネルを開いてクリックしますUpdate Track。 |
ダイアログが表示され、更新するフレーム範囲を設定できます。
| 3. | 必要なフレーム範囲を設定してクリックしますOK。 |
CameraTrackerは指定された範囲を追跡し、追跡データを既存のトラックと組み合わせます。
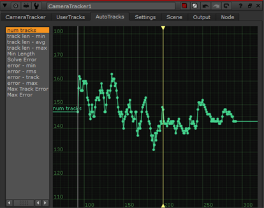
たとえば、元のAutoTracks > num tracks曲線は左側に示すように表示され、右側の画像は更新が完了した後の新しい追跡データを表しています。
|
|
|
| 元のフレーム範囲のトラックデータ。 | 拡張フレーム範囲を含む更新されたトラック。 |

ヒント: 範囲間の遷移が急に見える場合は、で説明されている方法を使用して、結合の周りのフレームを再追跡できます。 部分的なフレーム範囲の再追跡。
| 4. | に進むカメラ位置の解決。 |
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
Email Docs Teamフィードバックをお寄せいただきありがとうございます。
