쿼터니언 수정 자
쿼터니언 콘주 게이트
그만큼 Quaternion Conjugate 수정자는 쿼터니언의 역수를 계산합니다. 예를 들어 입력 쿼터니언의 Y 회전 각도가 45도이면 출력 쿼터니언의 Y 회전 각도가 -45 도입니다.
Input: 접합 할 쿼터니언.
Output: 공액 쿼터니언을 출력합니다.
축각으로부터의 쿼터니언
그만큼 Quaternion From Axis-Angle 수정자는 임의의 축을 중심으로 한 회전을 쿼터니언으로 변환합니다.
Axis: 회전을 수행 할 축입니다.
Angle: 축을 중심으로 회전하는 회전 각도입니다.
Quaternion: 결과를 출력합니다.
오일러 쿼터니언
그만큼 Quaternion From Euler 수정자는 XYZ 회전 각도를 쿼터니언으로 변환합니다.
Input: 변환 할 XYZ 회전 각도입니다.
Rotation Order: 세 축을 결합하는 데 사용되는 순서입니다. 오일러 회전에는 3 개의 짐 벌이 사용되므로 회전 순서가 중요합니다. 예를 들어 Rotation Order 채널이로 설정되었습니다 ZXY (기본값) Z 회전은 다른 축에 영향을주지 않고 먼저 수행됩니다. 다음으로 X 축이 회전하여 Z 중심선. 마지막으로 Y 축이 계산되어 X 과 Z. 대부분의 경우이 값은 Modo 변환 속성.
Quaternion: 결과를 출력합니다.
행렬의 쿼터니언
그만큼 Quaternion From Matrix 수정자는 회전 행렬을 쿼터니언으로 변환합니다.
Matrix: 변환 할 회전 행렬입니다.
Quaternion: 결과를 출력합니다.
쿼터니언 가치 얻기
그만큼 Quaternion Get Value 수정자는 쿼터니언 값을 나타내는 네 가지 구성 요소를 반환합니다.
Input: 해당 값을 읽을 입력 쿼터니언.
Value: 쿼터니언에 저장된 처음 세 구성 요소
Value W: 쿼터니언에 저장된 네 번째 구성 요소입니다.
쿼터니언 수학
그만큼 Quaternion Math 수정자는 두 개의 쿼터니언에서 간단히 수학 연산을 수행합니다. Add, Subtract, Multiply, or Divide. 일부 연산에서 쿼터니언 입력은 정류되지 않으므로 스와핑 Quaternion A 과 Quaternion B 주변에서 결과가 변경됩니다. 이러한 수정자는 인터페이스에서 4 개의 개별 수정 자로 표시되지만 실제로는 여러 수학 연산이있는 단일 수정 자입니다.
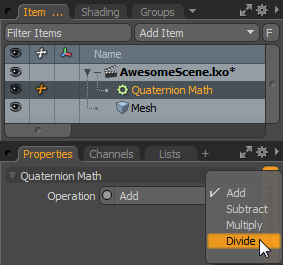
Quaternion A: 수학 연산에 사용 된 첫 번째 쿼터니언입니다.
Quaternion B: 수학 연산에 사용 된 두 번째 쿼터니언.
Operation: 수행 할 수학 연산 : Add, Subtract , Multiply 또는 Divide.
Output: 수학 연산이 수행 된 후 결과 쿼터니언.
쿼터니언 정규화
그만큼 Quaternion Normalize 수정자는 쿼터니언을 정규화하여 크기가 1.0이되도록합니다.
Input: 정규화 할 쿼터니언.
Output: 정규화 된 쿼터니언.
쿼터니언 설정 값
그만큼 Quaternion Set Value 수정자는 쿼터니언의 값을 나타내는 네 가지 구성 요소를 설정합니다.
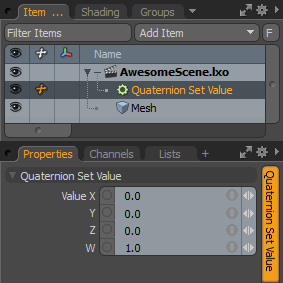
Value: 쿼터니언에 저장된 처음 세 구성 요소를 설정하는 데 사용되는 값입니다.
Value W: 쿼터니언에 저장된 네 번째 구성 요소를 설정하는 데 사용되는 값입니다.
Output: 결과 쿼터니언.
쿼터니언 슬러 프
그만큼 Quaternion Slerp 수정자는 두 쿼터니언 사이에 구형 선형 보간을 수행하여 한 쿼터니언에 저장된 회전을 다른 쿼터니언에 저장된 회전과 혼합합니다.
Quaternion A: 블렌딩 할 첫 번째 쿼터니언 값입니다.
Quaternion B: 혼합 할 두 번째 쿼터니언 값입니다.
Blend Amount: 두 쿼터니언 간의 블렌드 양입니다. 0 값은 쿼터니언 A를, 100 값은 쿼터니언 B를 반환합니다.이 두 값 사이의 값은 두 쿼터니언 사이의 보간을 반환합니다.
Output: 결과 쿼터니언.
축 각도에 대한 쿼터니언
그만큼 Quaternion To Axis-Angle 수정자는 쿼터니언을 임의의 축을 중심으로 한 회전으로 변환합니다.
Quaternion: 축 각도로 변환 할 쿼터니언입니다.
Axis: 회전이 수행되는 축입니다.
Angle: 축 주위에서 수행 된 회전 각도입니다.
오일러 쿼터니언
그만큼 Quaternion To Euler 수정자는 쿼터니언을 XYZ 회전 각도로 변환합니다.
Quaternion: XYZ 회전 각도로 변환 할 쿼터니언.
Rotation Order: 세 축을 결합하는 데 사용되는 순서입니다. 오일러 회전에는 3 개의 짐 벌이 사용되므로 회전 순서가 중요합니다. 예를 들어 Rotation Order 채널이로 설정되었습니다 ZXY (기본값) Z 회전은 다른 축에 영향을주지 않고 먼저 수행됩니다. 다음으로 X 축이 회전하여 Z 중심선. 마지막으로 Y 축이 계산되어 X 과 Z. 대부분의 경우이 값은 Modo 변환 속성.
Output: 결과 XYZ 회전 각도는 쿼터니언에서 변환됩니다.
쿼터니언에서 행렬로
그만큼 Quaternion To Matrix 쿼터니언을 회전 행렬로 수정합니다.
Quaternion: 행렬로 변환 할 쿼터니언입니다.
Matrix: 결과 회전 행렬을 출력합니다.
쿼터니언 벡터 곱하기
그만큼 Quaternion Vector Multiply 수정 자, 벡터에 쿼터니언을 곱합니다. 이것은 기본적으로 쿼터니언에 저장된 각도로 쿼터니언에 저장된 축을 중심으로 벡터를 회전시킵니다.
Quaternion: 벡터를 곱할 쿼터니언입니다.
Input: 쿼터니언을 곱할 입력 벡터입니다.
Output: 결과 벡터입니다.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로에 대한 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.