힌지 제약
힌지 구속 조건은 도어와 같이 힌지 조인트로 고정 된 것처럼 회전하도록 객체의 회전 이동을 제한합니다. 그러나 도어 힌지는 반대 힌지 플레이트의 충돌로 제한되므로 힌지 구속 조건은 휠 액슬과 마찬가지로 무제한 회전을 제공합니다. 조인트에 회전 범위 제한을 추가하여 도어 힌지의 움직임을 더욱 제한 할 수 있습니다. 힌지 구속 조건은 뷰포트에서 회전 지점 주위의 원으로 표시됩니다. 또한 조인트에 모터 힘을 가하여 회전하고 항목을 앞으로 이동시키는 휠을 만들 수 있습니다.
힌지 구속 조건을 자동으로 적용하려면 다음 단계를 수행하십시오.
| 1. | 구속 조건 유형을 호출하기 전에 두 개의 항목을 선택하십시오. |
선택된 첫 번째 항목은 마스터 또는 상위 항목을 나타내며 다음과 같이 정의됩니다. Body A 구속 조건에서 선택된 두 번째 항목은 다음과 같이 정의 된 보조 또는 하위 항목으로 제한되는 항목입니다. Body B.
| 2. | 항목이 선택된 상태에서 Dynamics 하위 탭에서 Hinge 구속 조건 버튼. |
구속 조건 항목을 Items 명부.
힌지 구속 조건의 기본 중심 위치는 Body A 과 Body B 구속 된 항목의 중심에 선을 그리는 객체. 의도에 따라 제약 조건에 대한 최적의 위치가 아닐 수도 있습니다. 하위 항목의 동작 (Body B)는 구속 조건 항목 자체의 위치에서 시작되므로 적절하게 배치해야합니다.
|
선택권 |
기술 |
|---|---|
|
Name |
현재 구속 조건 항목 이름을 표시합니다. 변경하려면 필드를 클릭하고 새 이름을 입력하십시오. |
|
Transform |
|
|
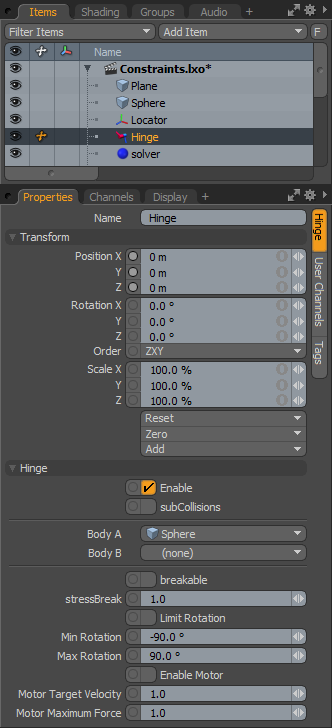
Position X/Y/Z |
이 값은 3D 월드 공간에서 구속 조건 항목의 초기 중심 및 구속하는 항목에 대한 질량 중심을 나타냅니다. 초기 위치를 기반으로, 역학 시뮬레이션이 호출되면 구속 항목이 초기 (휴식) 위치를 기준으로 회전 및 이동합니다. |
|
Rotation X/Y/Z |
이 값은 구속 항목의 초기 (휴식) 회전을 나타냅니다. |
|
Scale X/Y/Z |
이 값은 구속 조건에 직접적인 영향을 미치지 않습니다. |
|
Hinge |
|
|
Enable |
구속 조건 항목을 켜거나 끕니다. 활성화하면 구속 조건 항목이 다이나믹 시뮬레이션 중에 고려됩니다. 비활성화하면 제약 조건 항목이 무시됩니다. 그러나 비활성화 된 제약 조건은 Modo 세션과 함께 저장되며 현재 설정을 유지합니다. |
|
SubCollisions |
활성화하면 구속 된 객체 (특히 리터럴 체인이 아니라 후속 그룹화 인 체인 내의 객체)가 서로 충돌 할 수 있습니다. 비활성화되면 (기본 상태) 더 적은 계산이 필요하지만 제한된 항목이 서로 침투 할 수 있습니다. 이 경우 사용 SubCollisions. |
|
Body A |
다른 항목이 제한된 항목 인 부모 또는 마스터 항목을 나타냅니다. |
|
Body B |
제한된 항목, 하위 또는 보조 항목을 나타냅니다. |
|
Breakable |
특정 응력 임계 값에 도달 할 때 구속 조건을 분리 할 수 있습니다. Break Stress 값. 임계 값에 도달하면 구속 조건이 더 이상 구속 된 항목에 영향을 미치지 않으므로 시뮬레이션에 존재하는 다른 힘의 영향을받습니다. |
|
Stress Break |
구속 조건이 더 이상 구속 된 항목에 영향을 미치지 않는 임계 값을 결정합니다. 그만큼 Breakable 이 값이 제한 조건에 영향을 미치려면 옵션을 사용해야합니다. |
|
Limit Rotation |
힌지는 초기 회전에 제한되지 않습니다. 이 옵션을 사용하면 지금까지만 스윙 할 수있는 도어 힌지의 동작과 유사하게 구속 조건에 적용 할 수있는 회전 범위를 제한 할 수 있습니다. |
|
Min/Max Rotation Limit |
그만큼 Minimum 값은 회전 클램핑의 극한을 설정합니다. Maximum 값은 상한값을 제한합니다. |
|
Enable Motor |
일반적으로 힌지는 다이나믹 시뮬레이션에서 사용 가능한 힘의 영향을받습니다. 이 토글을 사용하면 회전력을 Body B 힌지 구속 조건의 위치를 중심으로 회전합니다. 회전 속도는 연결된 물체의 질량에 따라 Motor Target Velocity 그리고 Motor Maximum Force. |
|
Motor Target Velocity |
이 값이 0이 아닌 경우 회전 운동이 Body B 안건. 휠과 마찬가지로 양수 값은 항목을 앞으로 회전시키고 음수 값은 반대로 회전합니다. 동작 방향은 구속 조건의 초기 위치를 기준으로합니다. 모터는 힘, 질량 및 충돌을 고려하여 정의 된 목표 속도를 달성하려고합니다. |
|
Motor Maximum Force |
모터가 목표 속도에 도달하는 방법의 강도와 충돌 항목에 대한 반응을 결정합니다. |
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로에 대한 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
Email Docs Team의견을 보내 주셔서 감사합니다.
