매트릭스 수정 자
매트릭스 블렌드
이 채널 수정자를 사용하여 한 쌍의 회전 또는 변환 입력 행렬을 혼합 할 수 있습니다.
|
Matrix A/Matrix B |
이 채널에 혼합 할 두 매트릭스를 지정하십시오. 이는 3D 항목의 월드 또는 로컬 변환 행렬이거나 다른 채널 수정 자 항목의 행렬 출력 일 수 있습니다. 최상의 결과를 얻으려면 채널을 동일한 유형의 행렬로 연결하십시오. |
|
Blend |
Modo 이 블렌드 양을 사용하여 입력 행렬에 적용합니다. 값으로 0%, Modo 매트릭스 A 매트릭스를 변경하지 않고 출력합니다. 와 100%Modo 매트릭스 B 매트릭스를 변경하지 않고 출력합니다. 0 %에서 100 % 사이의 값은 Modo 두 입력 사이의 행렬을 보간합니다. 회전 행렬의 경우 Modo 쿼터니언 보간을 사용하고 변환 행렬에 Modo 선형 보간을 사용합니다. |
|
Matrix Output |
Modo 보간 결과를이 채널로 전달합니다. 이를 3D 항목 또는 다른 채널 수정 자의 호환 가능한 매트릭스 채널에 연결할 수 있습니다. |
매트릭스 작성
Matrix Compose Channel Modifier는 두 개 이상의 입력 행렬을 곱한 후 결과 변환 행렬을 전달합니다.
|
Matrix Inputs |
이 채널은 3D 항목의 매트릭스 채널 또는 다른 채널 수 정기 출력에서 여러 입력 링크를 허용합니다. Modo 이 채널을 연결할 때 사용한 순서대로 행렬을 여러 개로 묶습니다. |
|
Matrix Output |
Modo 작성된 매트릭스를이 채널에 출력합니다. 이를 3D 항목 또는 다른 채널 수정 자의 입력에서 호환 가능한 매트릭스 채널에 연결할 수 있습니다. |
매트릭스 구성

Matrix Construct 수정자는 벡터에서 4x4 변환 행렬을 만듭니다.
|
Input X/Input Y/Input Z |
결과 행렬의 위치 또는 스케일을 설명합니다. |
|
Matrix Type |
출력이 위치 매트릭스인지 스케일 매트릭스인지를 지정합니다. |
|
Output |
Modo 작성된 행렬을이 채널로 전달합니다. |
오일러 매트릭스
그만큼 Matrix From Euler 수정자는 4x4 회전 행렬에서 X, Y 및 Z 축의 회전 각도를 나타내는 벡터를 추출합니다.
|
Input X/Input Y/Input Z |
X, Y 및 Z 축 주위의 회전 각도를 설명합니다. |
|
Rotation Order |
세 축의 회전 순서를 설명합니다. 기본값으로 ZXY 주문, Modo Z 축을 나타내는 행렬을 만든 다음 X 축을 나타내는 행렬을 만든 다음 Y 축을 나타내는 행렬을 만들어 최종 행렬을 계산합니다. Modo 그런 다음 세 행렬을 곱하여 최종 행렬을 구성합니다. |
|
Output |
결과 회전 행렬을 출력합니다. |
오일러에 매트릭스
그만큼 Matrix To Euler 수정자는 4x4 회전 행렬에서 X, Y 및 Z 축의 회전 각도를 나타내는 벡터를 추출합니다.
|
Input X/Input Y/Input Z |
회전 각도를 추출 할 입력 회전 행렬을 나타냅니다. |
|
Rotation Order |
세 축의 회전 순서를 설명합니다. 기본값으로 ZXY 주문, Modo Z 축을 나타내는 행렬을 만든 다음 X 축을 나타내는 행렬을 만든 다음 Y 축을 나타내는 행렬을 만들어 최종 행렬을 계산합니다. Modo 그런 다음 세 개의 행렬을 사용하여 최종 행렬을 구성합니다. |
|
Output X/Output Y/Output Z |
X, Y 및 Z 축 주위의 회전 각도를 설명합니다. |
매트릭스 반전
그만큼 Matrix Invert 수정자는 입력 행렬에 저장된 변환을 반전시킵니다. 예를 들어, 입력 행렬이 90도, 45도 및 180 도의 회전을 저장하면 출력 매트릭스는 반대 방향 인 -90, -45 및 -180도를 저장합니다. 또한 위치와 스케일의 역수 또는 세 가지의 조합을 출력합니다.
이 수정자는 세계 중심에서 복잡한 3D 수학 연산을 수행하는 것이 바람직하기 때문에 매우 유용 할 수 있습니다. 변환 행렬에 역변환 행렬을 곱하면 항등 행렬이됩니다. 즉, 위치, 회전 및 100 % 스케일을 저장하지 않는 매트릭스입니다. 이를 통해 항목을 다시 중앙 위치로 쉽게 변환하고 수학 연산을 쉽게 수행 한 다음 원래 변환을 곱하여 다시 변환 할 수 있습니다.
|
Input |
반전시킬 행렬입니다. |
|
Output |
결과 역행렬. |
매트릭스 전치
매트릭스 전치 수정자는 주 대각선을 가로 질러 4x4 매트릭스를 반전시킵니다. Modo 행렬에 저장된 회전을 반전시킵니다. 따라서 예를 들어 X에서 90도 회전하면 -90도 회전이됩니다.
|
Input |
전치 할 값이있는 행렬을 나타냅니다. |
|
Output |
어디를 나타냅니다 Modo 전치 된 값으로 행렬을 전달해야합니다. |
행렬 벡터
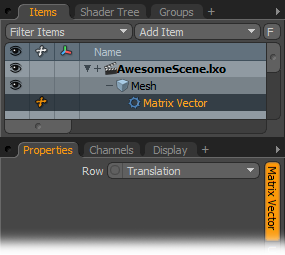
이 채널 수정자를 사용하여 회전 행렬 또는 변환 행렬에서 변환 행에서 정규화 된 방향 벡터를 추출합니다. 회전 행렬의 방향 벡터는 개별 X, Y 및 Z 회전이 수행 된 후 형성된 축입니다. 예를 들어 3D 항목의 세계 회전 행렬에서 Z 방향 벡터는 항목이 향하는 방향을 가리키고 Y 축은 항목의 위쪽을 가리 킵니다.
|
Matrix Input |
벡터를 추출 할 매트릭스 채널을이 채널로 연결합니다. 3D 항목의 매트릭스 채널이거나 다른 채널 수정 자의 출력 매트릭스 일 수 있습니다. |
|
Row |
회전 행렬에서 X, Y, Z 방향 벡터를 추출할지 또는 변환 행렬에서 번역을 추출 할지를 지정합니다. |
|
Output X/Output Y/Output Z |
행렬에서 추출한 벡터를이 세 채널로 전달합니다. |
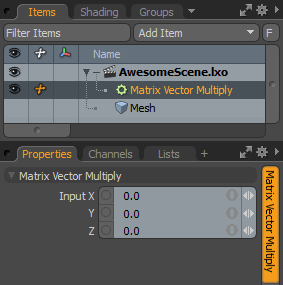
행렬 벡터 곱하기
그만큼 Matrix Vector Multiply 수정자는 변환 행렬에 벡터를 곱하고 결과 벡터를 출력합니다. 이것은 본질적으로 행렬에 저장된 모든 변환을 벡터에 적용합니다. 예를 들어, 벡터가 [1.0, 0.0, 0.0]의 값을 저장하고 행렬이 X에서 2m의 위치를 저장 한 경우 결과 벡터는 [3.0, 0.0, 0.0]이됩니다.
이 수정자는 회전 행렬과 함께 사용할 때 실제로 유용합니다. 예를 들어, 공간의 한 지점에서 발사 된 광선이있는 경우 광선 벡터에 회전 행렬을 곱하면 광선의 방향을 쉽게 변경하여 행렬에 저장된 값으로 회전시킬 수 있습니다.
|
Matrix |
벡터에 곱할 행렬입니다. |
|
Input |
행렬에 곱할 벡터입니다. |
|
Output |
결과 벡터입니다. |
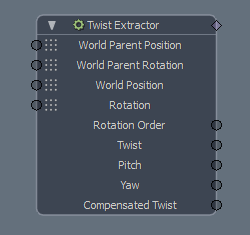
트위스트 추출기
이 채널 수정자를 사용하면 로컬 매트릭스에서 비틀기 (롤), 요 및 피치를 추출 할 수 있습니다. 그런 다음 트위스트 출력을 사용하여 손목이 회전 할 때 팔 아래 또는 발이 회전 할 때 다리 아래에서 변형을 부드럽게 할 수 있습니다.
예를 들어, 리그에 회전이 적용된 리그에 조인트가있는 경우 트위스트 추출기 노드를 사용하여 회전을 다른 조인트로 전송할 수 있습니다.
트위스트 추출기 노드를 추가하려면 회로도에서 Add... 그런 다음 Channel Modifiers > Matrix클릭 Twist Extractor.
노드는 관절의 꼬임을 설정 상태 또는 계층 구조의 다른 관절과 비교합니다.
노트 : 설정 모드에 대한 자세한 내용은 바인딩 및 설정 모드.
노드에서 트위스트 추출기 채널
|
World Parent Position |
선택한 관절의 부모 관절의 세계 위치입니다. |
|
World Parent Rotation |
선택한 관절의 부모 관절의 세계 회전입니다. |
|
World Position |
선택된 관절의 세계 위치. |
|
Rotation |
선택된 관절의 회전. |
|
Rotation Order |
행렬 추출을위한 회전 순서입니다. |
|
Twist |
세로 축을 중심으로 선택한 조인트의 회전롤이라고도합니다. |
|
Pitch |
가로 축을 중심으로 선택한 조인트의 회전입니다. |
|
Yaw |
수직 축을 중심으로 선택한 조인트의 회전입니다. |
|
Compensated Twist |
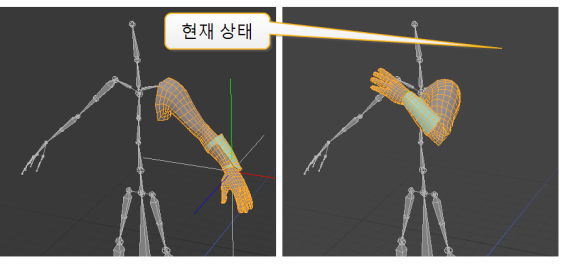
관절이 회전하면 경로가 대상의 방향에 영향을줍니다. 예를 들어, 팔을 세운 상태와 비교할 때 팔을 앞으로 세울 때 방향이 다릅니다. Twist, Yaw, Pitch의 순환 순서로 Modo 대상에서 방향이 동일하도록 보정 된 꼬임 값을 계산합니다. |
설정 예
에 Setup 모드에서 트위스트 추출기는 회전 값을 조인트의 설정 상태와 비교하고 차이를 추출합니다.
| 1. | 연결 Location 선택한 관절의 채널 Rotation 트위스트 추출기의 채널. |
노드는 설정과 비교하여 현재 회전의 차이에서 비틀기 데이터를 가져옵니다.
| 2. | 그런 다음 조인트를 Twist 트위스트 추출기의 채널을 Rotation 추출 된 값이있는 채널. |
표준 예
표준 모드에서는 트위스트 추출기 노드를 사용하여 선택한 관절과 해당 부모 또는 계층 구조의 다른 관절 사이의 비틀기를 비교할 수 있습니다. 그런 다음이 값을 사용하여 다른 관절의 회전을 유도 할 수 있습니다.
회로도에 트위스트 추출기 노드 및 관련 조인트 노드가 있는지 확인하십시오. 관절의 경우 World Position 과 World Rotation 채널. 구조도에 추가하려면 조인트를 선택한 다음 Channels 오른쪽 패널에서 뷰포트를 연 다음 필요한 채널을 회로도의 노드로 드래그합니다.
| 1. | 회전을 추출 할 조인트를 선택합니다. |
| 2. | Shift트위스트 추출기 노드를 + 클릭하여 선택에 추가합니다. |
오른쪽 패널에서 Twist Extractor 노드의 속성이 열립니다.
| 3. | 확인하십시오 Setup Mode 비활성화되어 있으며 Rotation Order Input 이다 Automatic: Twist First. |
| 4. | 트위스트 추출기 속성에서 Auto Connect 단추. |
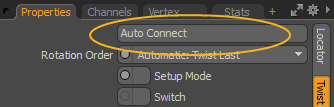
선택한 관절을 추가합니다 World Position 과 World Rotation 채널을 노드로 가져 가서 트위스트 추출기에 연결합니다. World Position 과 Rotation 채널.
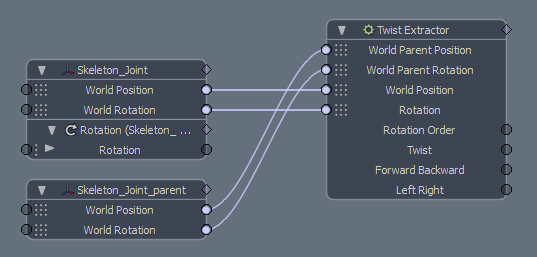
| 5. | 회전을 적용 할 조인트를 추가하고 회전 채널을 트위스트 추출기의 Twist, Forward Backward , Left Right 채널. |
선택한 관절에 회전 값이 적용됩니다.
트위스트 추출기 속성
|
Auto Connect |
언제Setup Mode 이 기능을 사용하면 선택한 로케이터를 트위스트 추출기 노드에 연결할 수 있습니다. 로케이터와 트위스트 추출기가 선택된 상태에서이 버튼을 클릭하면 로케이터와 트위스트 추출기 노드 사이의 연결이 자동으로 설정됩니다. 노트 : 언제 Setup Mode 사용 가능, Auto Connect 사용할 수 없습니다. |
|
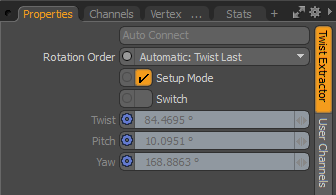
Rotation Order |
행렬에서 회전이 추출되는 순서입니다. 특정 축 순서 외에도 다음과 같은 옵션이 있습니다. • Automatic: Twist First -기본 옵션입니다. 트위스트 축에서 시작하여 회전을 추출하고 다른 축은 직접 회전 순서를 따릅니다. Z는 일반적으로 관절 회전 축이므로 순서는 ZXY입니다. • Automatic: Twist Last -트위스트 축을 마지막으로 사용하고 다른 축은 직접 회전 순서를 따릅니다. 일반적으로 Z는 관절 회전 축이므로 순서는 XYZ입니다. |
|
Setup Mode |
활성화되면 (기본 상태) 트위스트 추출기는 설정과 비교하여 현재 회전의 차이에서 트위스트 데이터를 추출합니다. 비활성화하면 트위스트 추출기를 사용하여 상위 또는 계층 구조의 다른 로케이터와 비교하여 조인트에서 비틀림 값을 가져올 수 있습니다. |
|
Switch |
트위스트 추출기는 두 가지 방식으로 트위스트를 계산합니다. 기본 계산으로 예상 결과가 나오지 않으면 Switch 다른 방법으로 비틀기를 계산합니다. |
|
Twist |
세로 축을 중심으로 선택한 조인트의 회전롤이라고도합니다. |
|
Pitch |
가로 축을 중심으로 선택한 조인트의 회전입니다. |
|
Yaw |
수직 축을 중심으로 선택한 조인트의 회전입니다. |
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로에 대한 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.