C_CameraIngest
C_CameraIngest는 타사 응용 프로그램에서 수동으로 해결하거나 미리 추적 한 푸티지를 촬영하고 CaraVR 메타 데이터를 스트림에 추가하여 스티 처에 전달할 카메라 간의 관계 모델을 구축하거나 C_CameraSolver를 통한 세부 조정의 기초로 사용합니다.
C_CameraSolver에서 내 보낸 카메라와 함께 C_CameraIngest를 사용할 수도 있습니다. 사전 설정 노드로 내보내기 자세한 내용은. 카메라 노드와 연결된 축 노드에는 리그에 적용된 모든 전역 회전이 포함됩니다.
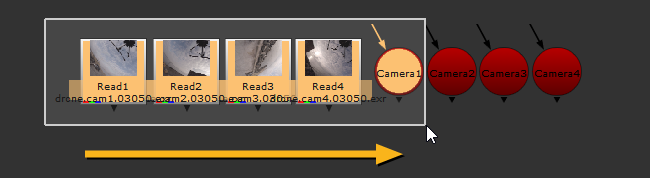
| 1. | 다음을 사용하여 이미지 시퀀스 및 카메라 데이터를 읽습니다. Nuke표준 읽기 및 카메라 노드. |
| 2. | 입력이 올바르게 연결되도록 모든 읽기 노드 및 카메라 노드를 선택하십시오. |
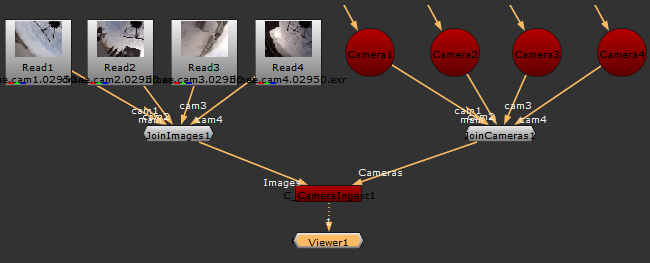
| 3. | C_CameraIngest를 노드 그래프에 추가하십시오. |
CaraVR은 이름이 바뀐 JoinViews 노드, JoinImages 및 JoinCameras를 사용하여 모든 이미지와 카메라를 C_CameraIngest 노드에 연결합니다.
노트 : 노드를 잘못된 순서로 선택한 경우 노드 입력을 수동으로 다시 연결해야 할 수도 있습니다.
| 4. | 뷰어를 C_CameraIngest 노드에 연결하여 기본보기를 표시하십시오. |
| 5. | 딸깍 하는 소리 Camera Views > Create 필요한 경우 더 많은 뷰를 추가합니다. |
그만큼 Create Camera Views 대화 상자가 표시됩니다.
| 6. | 작성하려는보기 수를 입력하십시오. 예를 들어, 스크립트에 이미 4 개의보기가 포함 된 경우 대화 상자에 7을 입력하면 3 개의 새보기가 작성됩니다. |
노트 : 현재보기 수보다 적은 수를 입력하면 스크립트에서 추가보기가 삭제됩니다.
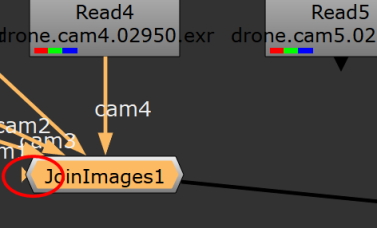
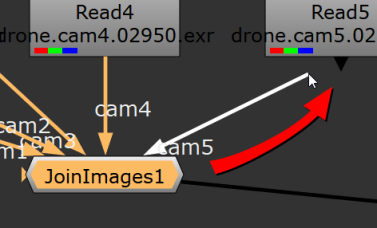
추가 이미지 및 카메라 입력은 JoinImages 및 JoinCameras 노드의 왼쪽에 추가되고 끌어서 놓아 입력을 정상적으로 연결합니다.
|
|
|
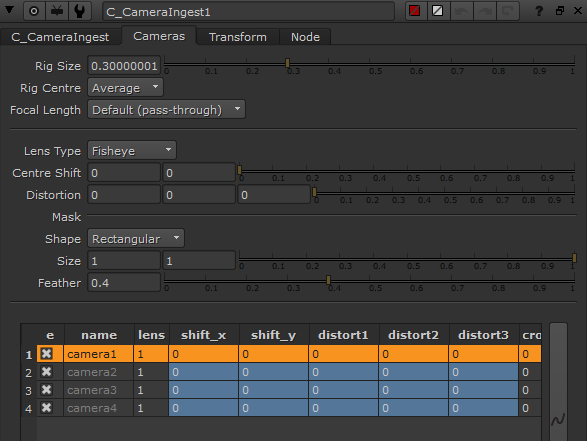
노트 : 카메라 노드 Nuke 렌즈 왜곡 컨트롤을 포함하지 않으므로 C_CameraIngest는 카메라 테이블을 Properties 에 패널 Cameras C_CameraSolver 컨트롤에있는 것과 유사한 탭.
| 7. | 설정 Converge 카메라가 겹치는 깊이를 제어하여 장면의 단일 관심 지점에 초점을 맞출 수 있습니다. |
노트 : 그만큼 Converge 제어는 영향을 미치지 않습니다 Nodal Layouts.
| 8. | 그런 다음 결과를 더 구체화하기 위해 C_Stitcher 또는 C_CameraSolver에 전달할 수 있습니다. 보다 C_ 스티 처 과 C_CameraSolver 자세한 내용은. |
익스트림 어안 초점 거리
Nuke 극단적 인 어안 초점 거리를 직선으로 자동 변환 할 수 없습니다. C_CameraSolver에서 일부 어안 카메라를 내보내려고하면 경고 메시지가 표시됩니다.

이 경우 C_CameraIngest를 사용하여 초점 길이를 변경하지 않고 통과 할 수 있으므로 문제없이 극단적 인 어안 카메라 데이터를 수집 할 수 있습니다.
노트 : 그만큼 Camera Ingest 옵션 설명 사전 설정 노드로 내보내기 C_CameraSolver에서 어안 초점 거리가 변환되지 않은 카메라 노드를 만듭니다.
그만큼 Focal Length 의 제어 Properties 패널, Cameras 탭을 사용하면 초점 거리를 직선으로 자동 변환하는 대신 변경되지 않은 초점 길이를 통과 할 수 있습니다.
Default (pass-through) 의 기본 설정입니다 Focal Length 제어. 그런 다음 매트릭스에서 카메라를 선택할 수 있습니다 Cameras 탭하고 카메라 정보를 입력하여 결과를 향상시킵니다.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.