자동 추적 문제 해결
아무리 정교한 추적이 되더라도 일부 시퀀스는 필연적으로 문제를 일으킬 것입니다. 에 많은 컨트롤이 있습니다 Settings 더 나은 결과를 얻을 수있는 탭. 이러한 설정을 조정하고 다시 추적하여 결과를 개선하십시오.
팁: 사용자 트랙을 추가하여 결과를 더욱 향상시킬 수도 있습니다. 보다 수동 추적 자세한 내용은.
기능 설정
이 컨트롤은 C_Tracker가 프레임 당 분석하는 자동 감지 기능의 수와 위치를 결정합니다. 사용 Preview Features 컨트롤 변경이 이미지에서 피처의 위치에 어떤 영향을 미치는지 확인할 수 있습니다.
노트 : 추적 시간이 오래 걸립니다 Preview Features 다시 추적하기 전에 사용 중지하는 것을 잊지 마십시오.
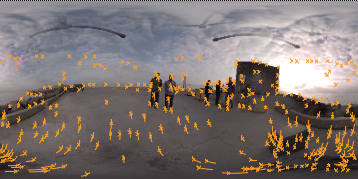
• Number of Features -각 프레임에서 추적하려는 기능 수를 설정합니다.
대부분의 경우 기본값 300이면 충분하지만 어려운 순서에서는 더 높은 숫자를 사용하는 것이 좋습니다.
|
|
|
|
낮은 Number of Features. |
높은 Number of Features. |


팁: 검사 enforce 어떤 트랙을 멈추고 새로운 트랙을 파종하는 것을 의미하더라도 트랙 수를 일정하게 유지하기 위해 Track forwards and backwards 사용 가능.
• Feature Spread -이미지에 기능의 확산을 설정합니다.
값이 클수록 로컬 영역에서 구별되는 점이 선택되고 값이 작을수록 대비가 높은 영역에서 더 두드러진 점이 선택됩니다.
|
|
|
|
낮은 Feature Spread. |
높은 Feature Spread. |


• Feature Separation -서로에 대한 지형지 물의 분포를 설정합니다.
피처를 이미지에서 균일 한 간격으로 균일하게 분산시키고 피처를 고르게 퍼 뜨리려면 피처 분리 값을 높게 입력하십시오.
|
|
|
|
낮은 Feature Separation. |
높은 Feature Separation. |


팁: 검사 enforce 전체 트랙 수가 적더라도 분리 할 수 있습니다.
검사 Refine Feature Locations 감지 된 피처를 로컬 모서리에 고정합니다. 이 기능을 활성화하면 C_Tracker가 푸티 지에서 가장 가까운 코너 포인트를 찾아서 해당 기능을 잠급니다.
추적 설정
다음 컨트롤을 사용하여 기능 트랙 세트를 개선 한 다음 재 추적하여 문제를 해결할 가능성을 향상시킬 수 있습니다.
• Track forwards and backwards -이 컨트롤을 사용하면 안정화 결과를 향상시킬 수 있지만 트랙을 생성하는 데 시간이 더 걸립니다.
• Patch Size -시퀀스를 분석 할 때 C_Tracker가 찾는 패턴의 크기를 설정합니다.
이 값을 줄이면 패턴을보다 가깝게 일치시킬 수 있지만 값이 높을수록 더 안정적인 트랙을 만들 수 있습니다.
• Minimum Length -최소 허용 트랙 길이에 대한 임계 값을 설정합니다. 이 프레임 수만큼 관련 기능을 유지하지 못하는 트랙은 거부됩니다.
장시간 느린 카메라 움직임에서는 샷에서 생성 된 긴 트랙을 해결하는 것이 가장 좋습니다. 짧은 트랙이 많으면 계산 된 카메라에서 노이즈가 발생할 수 있습니다. 해결하기 전에 짧은 트랙을 제거하십시오.
|
|
|
|
낮은 Minimum Length. |
높은 Minimum Length. |


• Track Error Threshold -트랙을 따라 변경되는 C_Tracker의 허용 오차는이 컨트롤에 의해 결정됩니다.
이 임계 값을 높이면 이미지 변경에 더 잘 견딜 수있어 추적 시간이 길어질 수 있습니다.
|
|
|
|
낮은 Track Error Threshold. |
높은 Track Error Threshold. |

노트 : 그만큼 Track Error Threshold 기본적으로 사용자 트랙에도 적용됩니다. 사용자 트랙에이 임계 값을 적용하지 않으려면 apply to user tracks 제어.
• Track Smoothness -부드러운 트랙 생성을위한 임계 값을 설정합니다. 이 값을 조정하면 복잡한 시퀀스에서 불량한 트랙을 방지하는 데 유용 할 수 있습니다.
평활도 값을 높이면 시간이 지남에 따라 실패한 트랙이 제거됩니다.
• Track Consistency -C_Tracker가 기능 트랙을 버리고 다른 위치에 시드하기 전에 기능 트랙이 일치하지 않는 임계 값을 설정합니다.
값이 클수록 불일치가 줄어 듭니다.
추적 기능의 수와 분포에 만족하면 카메라를 풀고 결과를 안정화 또는 일치 이동에 사용할 수 있습니다. 보다 카메라 해결 자세한 내용은.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.