결과 다듬기
결과를 세분화하려면 :
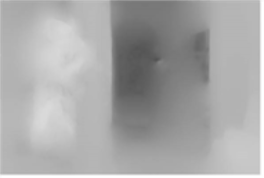
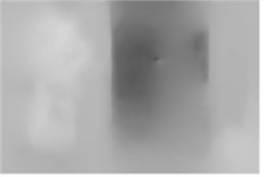
| 1. | 맞추다 DepthDetail 깊이 맵을 계산하는 데 사용되는 이미지의 해상도를 변경합니다. 기본값 0.5는 이미지 해상도의 절반과 같습니다. 낮은 값은 처리 속도를 높이고 더 부드러운 결과를 제공합니다. 값이 클수록 세밀한 부분이 포착되지만 처리 시간도 늘어납니다. |
|
|
|
| Depth Detail = 0.15 | Depth Detail = 0.85 |
| 2. | 평평한 이미지 영역에서 심도 맵에 노이즈가있는 것으로 확인되면 Noise 의 가치 Depth Generation 파라미터 그룹. 깊이 맵을 계산할 때 입력 푸티 지에서 DepthGenerator가 무시해야하는 노이즈의 양을 설정합니다. 값이 클수록 깊이 맵이 더 매끄 럽습니다. |
|
|
|
| Noise = 0 | Noise = 0.15 |

| 3. | 깊이 맵이 여전히 더 매끄러 워야한다고 생각한다면 Smoothness. 심도 계산에 영향을주는 것이 아니라 결과에 지능적인 흐림 효과가 적용됩니다. |
매끄러움이 높으면 많은 부분적인 디테일을 놓칠 수 있지만 시끄러운 깊이 값을 생성 할 가능성은 적습니다. 결과 깊이 맵이 들쭉날쭉하더라도 부드러운 정도가 디테일 일치에 집중됩니다.
| 4. | 그만큼 Strength 매개 변수는 프레임 사이의 픽셀 일치 강도를 정의합니다. 일반적으로 기본값을 그대로 둘 수 있습니다. 그러나 심도 맵이 이미지의 일부 가장자리에 맞지 않는 것처럼 보일 경우 Strength 세밀한 부분이 누락 된 부분을 강제로 일치시킵니다. 당신은 또한 줄일 수 있습니다 Strength 깊이 맵을 매끄럽게하려면 일반적으로 알고리즘이 이미지와 일치하고 깊이를 정확하게 계산하도록 상대적으로 높은 값을 유지하는 것이 좋습니다. |
|
|
|
| Strength = 0.5 | Strength = 1.5 |
| 5. | 깊이 맵의 객체 경계에 만족하지 않으면 조정하십시오. Sharpness. 높은 값을 사용하여 개체간에 뚜렷한 경계를 만들거나 낮은 값을 사용하여 경계를 부드럽게합니다. |
|
|
|
| Sharpness = 0.05 | Sharpness = 0.95 |

| 6. | 필요한 경우 Near Clip Plane 과 Far Clip Plane 깊이 맵에서 허용되는 최소값과 최대 값을 설정합니다. 이 범위를 벗어난 모든 깊이 값은이 값으로 잘립니다. |
| 7. | 깊이 계산이 모호한 영역이 있는지 확인하려면 Mark Bad Regions. |
모호한 영역은 깊이 맵에서 매우 큰 값으로 표시됩니다. 예를 들어 특정 카메라 움직임으로 인해 CameraTracker가 카메라 데이터를 사용하여 모든 픽셀의 깊이를 계산할 수없는 경우 이러한 영역이 발생할 수 있습니다.
|
|
| Mark Bad Regions 가능. |

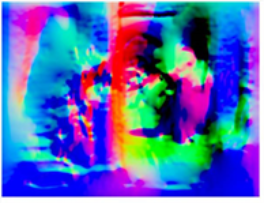
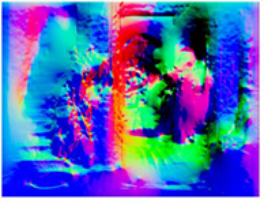
| 8. | 깊이 맵에 만족하도록 매개 변수를 설정 한 후에 법선 패스를 봅니다 (이전에 생성하기로 결정한 경우). 법선은 심도에서 계산되며 법선 방향은 픽셀 사이의 심도 변화에 의해 정의됩니다. 깊이의 작은 변화는 법선의 큰 변화로 이어 지므로 법선 통과는 시끄 럽습니다. 저해상도 심도 맵을 사용하여 법선을 계산하여 법선 맵을 부드럽게하려면 Normal Detail. 이것은 넓은 픽셀 범위에 걸쳐 깊이 변화를 통합하여 노멀 패스의 노이즈를 줄입니다. |
기본값 0.25는 법선 통과가 1/4 해상도로 계산되도록합니다.
|
|
|
| Normal Detail = 0.2 | Normal Detail = 0.8 |
| 9. | 로 진행 결과 사용. |
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.