문제 해결
CameraTracker에는 해결 정확도를 향상시키는 데 사용할 수있는 몇 가지 문제 해결 워크 플로가 있지만 궁극적으로 올바른 해결 방법은 우수한 추적 데이터를 사용합니다.
곡선 임계 값을 사용하여 트랙 삭제
에서 임계 값 컨트롤을 사용할 수 있습니다 AutoTracks 탭을 사용하여 트랙을 동적으로 거부하고 제거하여 정확도를 향상시킵니다. 사용하여 error - rms 예를 들어 곡선 :
| 1. | 클릭 AutoTracks 속성에서 탭을 선택하고 error - rms 곡선. |
팁: 프레스 F 곡선 표시에서 선택한 트랙을 사용 가능한 화면 공간에 맞 춥니 다.
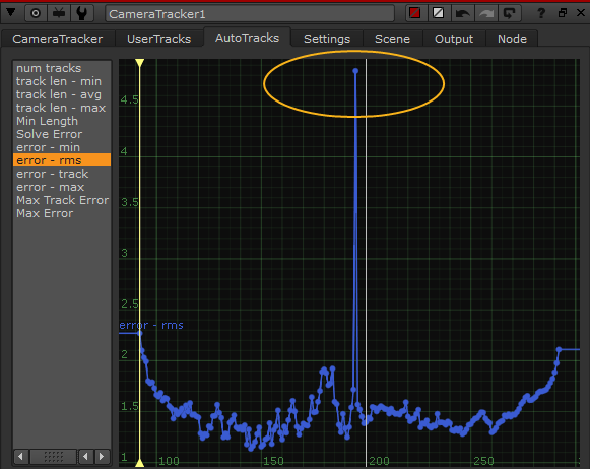
이 예에서는 프레임 195 주위에서 오차 곡선이 크게 증가했음을 알 수 있습니다.
| 2. | 뷰어 재생 헤드를 영향을받는 영역으로 이동하고 뷰어에서 추적 된 기능을 검사하십시오. |
| 3. | 당신이 감소하면 Max Track Error 속성 패널에서 컨트롤을 사용하면 트랙이 임계 값 아래로 떨어지면서 트랙이 빨간색으로 바뀌기 시작합니다. |
|
|
|
| Max Track Error 6으로 설정 | Max Track Error 2로 설정하십시오. |


| 4. | 딸깍 하는 소리 Delete Rejected 지정된 임계 값 아래로 떨어지는 모든 트랙을 제거합니다. |
팁: 뷰어에서 트랙을 선택하고 마우스 오른쪽 단추를 클릭하여 선택하여 트랙을 수동으로 제거 할 수도 있습니다. tracks > delete selected.
| 5. | 그런 다음 클릭하여 영향을받는 프레임 범위를 해결할 수 있습니다 Update Solve. |
| 6. | 를 사용하여 더 나은 해결을 Settings 탭 Solving 통제 수단: |
• Camera motion -계산을 계산하는 동안 CameraTracker가 고려해야 할 카메라 움직임을 설정합니다.
• Keyframe Separation -키 프레임 사이의 분리 값을 조정합니다.
높은 분리 값은 더 큰 확산으로 더 적은 키 프레임을 생성하며 일반적으로 느린 카메라 동작에 사용됩니다.
값이 낮을수록 더 긴밀한 스프레드로 더 많은 키 프레임이 생성되며 일반적으로 빠른 카메라 동작에 사용됩니다.
노트 : 활성화되면 Reference Frame 컨트롤은 첫 번째 키 프레임이 배치되는 위치를 결정합니다.
• Smoothness -값이 높을수록 '무게'를 추가하여 경로를 다듬어 카메라 경로를 부드럽게 할 수 있습니다.
• Reference Frame -카메라 해결 업데이트를위한 시작 프레임을 지정하고 첫 번째 키 프레임의 위치를 결정할 수 있습니다.
노트 : 검사 Set reference frame 이 컨트롤을 활성화합니다.
해결 정제
에 AutoTracks 탭에서 Refinement 섹션에는 해결 개선에 도움이되는 세 가지 개선 컨트롤이 있습니다. 만약 Error 과 per frame 에 컨트롤 CameraTracker 탭에 상대적으로 높은 값이 표시되면 이너 트랙을 사용하여 해결을 수정하십시오. 이너는 커브 임계 값으로 정의되며 초점 거리, 카메라 위치 또는 카메라 회전 (또는 이들의 조합)을 조정할 수 있습니다. 먼저 카메라 해결을 수동으로 편집 할 수 있습니다. Output 탭을 선택한 다음 :
• Focal Length -카메라의 초점 거리를 미세 조정하십시오.
• Position -카메라 위치를 미세 조정하십시오.
• Rotation -카메라 회전을 미세 조정하십시오.
마지막으로 클릭 Refine Solve.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.