사전 설정 노드로 내보내기
C_Stitcher는 Export 드롭 다운-사전 설정 스크립트 구성 요소를 자동으로 추가하여 일반적인 VR 작업에 대한 노드 트리를 빠르게 만들 수 있습니다.
드롭 다운에서 필요한 작업을 선택한 다음 Create 스크립트를 노드 그래프에 추가하려면 :
• STMap (split) -a를 포함하는 단일 C_STMap을 만듭니다. stitch_map 스티치의 모든 뷰에 대한 채널. 뷰어 위의보기를 선택한 다음 C_Stitcher 출력에서 개별보기를 검사 할 수 있습니다. stitch_map 에서 채널 channels 쓰러지 다.
• STMaps (separate) -를 포함하는 별도의 C_STMap 노드를 만듭니다. stitch_map 스티치의 각보기에 대한 채널.
이 수출은 STMap (split)하지만 OneView 노드를 사용하여보기가 개별 스트림으로 분리됩니다.
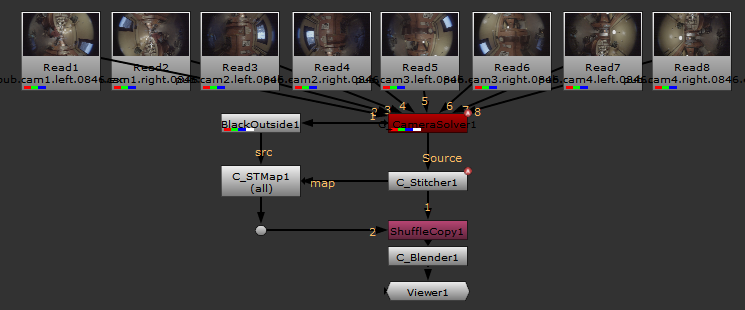
• Manual STMap Stitch (split) -C_CameraSolver에서 원본 입력을 왜곡하는 워크 플로우를 생성합니다. stitch_map 스티치의 모든 뷰에 대한 채널. 그런 다음 뷰는 C_Blender로 전달되어 스티치를 만듭니다.
• Manual STMap Stitch (separate) -C_CameraSolver의 원본 입력을 별도의 C_STMap을 통해 왜곡하는 워크 플로우를 작성합니다. stitch_map 스티치의 모든보기에 대한 채널. 그런 다음 JoinViews를 사용하여 뷰를 다시 결합하고 최종 출력을 C_Blender에 전달하여 스티치를 만듭니다.
이 수출은 Manual STMap Stitch (split)뷰는 뷰당 두 개의 OneView 노드 (C_CameraSolver 뷰용 하나와 C_STMap 변환 정보 용 하나)를 사용하여 개별 스트림으로 분리됩니다.
• PPass (split) -a를 포함하는 단일 C_STMap을 만듭니다. ppass_map 스티치의 모든 뷰에 대한 채널. 뷰어 위의보기를 선택한 다음 C_Stitcher 출력에서 개별보기를 검사 할 수 있습니다. ppass_map 에서 채널 channels 쓰러지 다.
• PPass (separate) -를 포함하는 별도의 C_STMap 노드를 만듭니다. ppass_map 스티치의 각보기에 대한 채널.
이 수출은 PPass (split)하지만 OneView 노드를 사용하여보기가 개별 스트림으로 분리됩니다.
• Manual PPass Stitch (split) -C_CameraSolver에서 원본 입력을 왜곡하는 워크 플로우를 생성합니다. ppass_map 스티치의 모든 뷰에 대한 채널. 그런 다음 뷰는 C_Blender로 전달되어 스티치를 만듭니다.
• Manual PPass Stitch (separate) -C_CameraSolver의 원본 입력을 별도의 C_STMap을 통해 왜곡하는 워크 플로우를 작성합니다. ppass_map 스티치의 모든보기에 대한 채널. 그런 다음 JoinViews를 사용하여 뷰를 다시 결합하고 최종 출력을 C_Blender에 전달하여 스티치를 만듭니다.
이 수출은 Manual PPass Stitch (split)뷰는 뷰당 두 개의 OneView 노드 (C_CameraSolver 뷰용 하나와 C_STMap 변환 정보 용 하나)를 사용하여 개별 스트림으로 분리됩니다.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.