시차 벡터 생성
C_DisparityGenerator 노드는 스테레오 이미지에 대한 시차 맵을 작성하는 데 사용됩니다. 디스 패리티 맵은 다른 뷰에서의 대응하는 픽셀의 위치와 관련하여 한 뷰에서의 픽셀의 위치를 설명한다. 여기에는 두 세트의 디스 패리티 벡터가 포함되어 있습니다. 하나는 왼쪽 뷰를 오른쪽에 매핑하고 다른 하나는 오른쪽 뷰를 왼쪽에 매핑합니다.
노트 : C_DisparityGenerator는 Ocula 버전과 다른 점으로, 대기 시간이 길어질 수 있습니다. 즉, 이미지가 줄 바꿈 될 때 시차 벡터가 프레임 가장자리를 통과 할 때 매핑됩니다.
최종 시차 벡터는 시차 채널에 저장되므로 시차 맵을 처음 계산할 때 이미지 데이터가 나타나지 않을 수 있습니다. 내부 출력을 보려면 Nuke에서 디스 패리티 채널을 선택하십시오. channels 뷰어의 왼쪽 상단에있는 컨트롤
|
|
|
|
소스 이미지 |
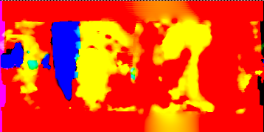
관련된 디스 패리티 벡터. |

도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.