워프 구속
시퀀스를 뒤 틀면 카메라 뷰에 적용된 전체 뒤틀림의 일부로 직선이 변형 될 수 있습니다. 직선 입력 이미지에서 알려진 직선에 구속 조건을 추가하면 전역 왜곡의 영역을 고정하여이 변형을 줄일 수 있습니다.
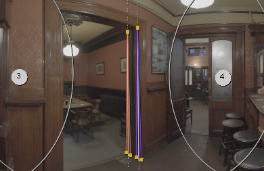
일반적으로 구속 조건은 두 개의 인접 뷰에 나타나는 피쳐에 적용되며 C_GlobalWarp는 표시된 영역이 동일한 대상으로 뒤틀 리도록합니다.
|
|
|
|
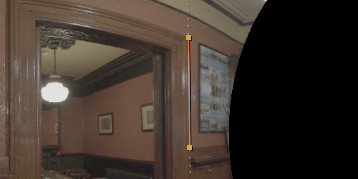
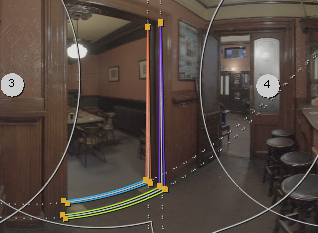
Cam3 및 Cam4에 표시된 제약. |
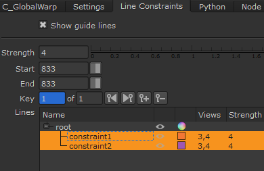
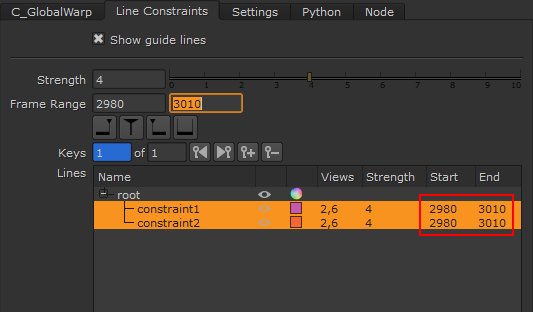
의 제약 Properties 패널. |
뒤틀린 이미지보기
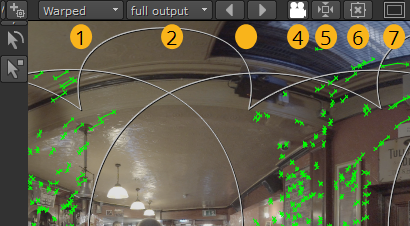
뷰어의 왼쪽 상단에있는 도구를 사용하여 전체 출력 또는 개별보기를 볼 수 있습니다. 각 뷰는 뒤틀린 결과 또는 위도 및 직선으로 소스 뷰로 제공됩니다.
|
1 |
출력 모드 |
C_CameraSolver의 뒤틀린 출력과 소스 간을 뷰어간에 전환합니다. |
|
2 |
출력보기 |
보기를 출력으로 설정합니다. 카메라별로 개별 뷰를 선택하거나 full output. |
|
삼 |
이전 / 다음보기 |
출력보기간에 빠르게 교환하십시오. |
|
4 |
투사 |
뷰어에서 latlong 및 직선 디스플레이간에 전환합니다. |
|
5 |
센터 뷰 |
직선 또는 단일 카메라 뷰에서 뷰를 중앙에 배치하려면 클릭합니다. 이 버튼은 효과가 없습니다 full output 방법. |
|
6 |
회전 재설정 |
C_GlobalWarp에서 카메라에 적용된 회전을 재설정하려면 클릭하십시오. |
|
7 |
카메라 표시 |
카메라 오버레이를 켜거나 끄려면 클릭하십시오. |
구속 조건 추가
카메라 뷰의 핀 영역을 제한하여 인접한 카메라의 왜곡이 동일한 대상을 갖고 선 오버레이와 겹치는 모든 점이 직선으로 매핑되도록합니다. 에 제약 조건을 추가 할 수 없습니다 full output 모드이므로 다음 중 하나를 수행해야합니다.
• 카메라를 사용하여 선택한 개별 카메라 뷰 view 뷰어 위의 버튼 또는
• 당신이에 있다면 main 뷰에서 선택된 카메라 Output View 쓰러지 다.
제약 조건을 추가하려면
| 1. | 인접한 두 대의 카메라에서 발생하는 알려진 선형 피처를 찾습니다. 예를 들어 도어 프레임, 테이블 상판, 타일 등이 있습니다. |
| 2. | 기능이 포함 된 첫 번째보기를 선택하고 Add Point |
팁: 누르고 있으면 포인트를 추가 할 수도 있습니다 Ctrl/Cmd+Shift 뷰어를 클릭하십시오.
| 3. | 구속 조건이 시작되고 끝나는 뷰어를 클릭하십시오. |
|
|
|
|
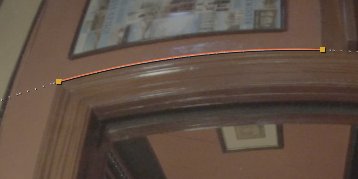
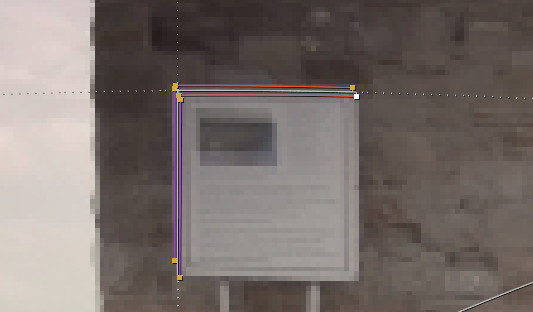
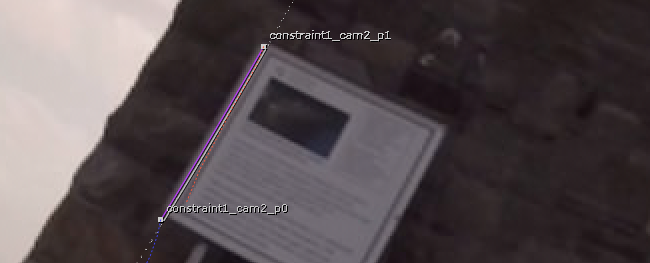
직선 뷰의 구속 조건. |
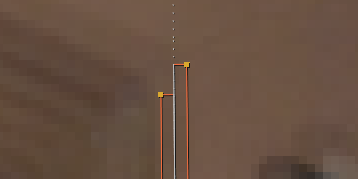
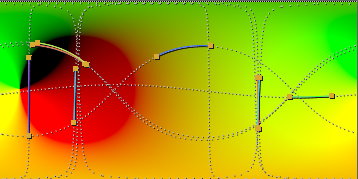
latlong 공간에 동일한 구속 조건이 투영되었습니다. |
| 4. | 피쳐가 포함 된 두 번째 뷰를 선택하고 구속 조건이 시작되고 끝나는 뷰어를 클릭하십시오. |
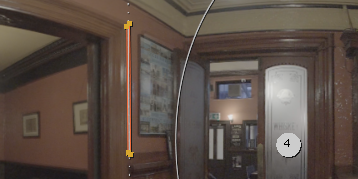
다시 전환하면 main 보거나 full output, 구속 점은 뷰 사이에서 연결됩니다.
|
|
|
|
메인 뷰에서 2 뷰 제약. |
제약 조건을 닫습니다. |
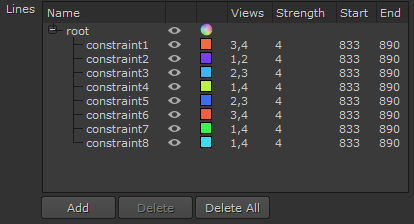
| 5. | 에서 구속 조건을 선택하십시오 Properties > Line Constraints > Lines 테이블과 설정 Strength 그리고 프레임 범위 컨트롤. |
• Strength -구속 조건의 강도 바이어스를 설정합니다. 구속 조건의 강도를 높이면 뒤틀린 출력이 구속 조건에 수렴됩니다. 구속 조건은 C_CameraSolver의 사용자 일치와 가중치가 비슷합니다.
• Start 과 End -구속 조건이 영향을받는 프레임을 설정합니다. 구속 조건 기능이 샷에서 벗어나거나 가려지면 이러한 컨트롤을 사용할 수 있습니다.
| 6. | 연관된 형상이 이동하거나 모양이 변경되는 경우 구속 조건의 키 프레임을 설정하십시오. 보다 애니메이션 매개 변수 애니메이션 키 프레임에 대한 자세한 내용은C_GlobalWarp를 사용하여 제약 조건을 추적 할 수도 있습니다. Tracking 통제 수단. 보다 추적 제약 자세한 내용은. |
| 7. | 보존하려는 영역에 필요한만큼 제한을 추가하십시오. |
다른 구속 조건을 시작하기 전에 구속 조건을 모두 작성했는지 확인하십시오. 그렇지 않으면 다음 점이 이전 구속 조건에 추가됩니다. 구속 조건을 완성하는 가장 쉬운 방법은 Lines 표.
를 눌러 기존 구속 조건에 점을 추가하는 경우 Ctrl/Cmd+Shift 뷰어를 클릭하면을 눌러 새로운 구속 조건을 시작할 수 있습니다 N (새 구속 조건 키보드 단축키)를 클릭 한 후 모든 후속 점이 새 구속 조건에 추가됩니다.
팁: 너무 많은 영역을 제한하면 '모든 것'이 고정되어 있기 때문에 글로벌 워프가 합리적인 워프를 생성하는 데 어려움이있을 수 있습니다.
그만큼 Lines 표에는 추가 한 모든 구속 조건이 표시되며 Views 그들은에 있고 Strength 그들에게 편견이 있습니다.
노트 : 를 사용하여 개별 구속 조건을 표시하거나 숨길 수 있습니다 ![]() 숨겨진 구속 조건은 변형에 영향을 미치지 않습니다.
숨겨진 구속 조건은 변형에 영향을 미치지 않습니다.
| 8. | 구속이 끝나면 클릭 Warp 구속 조건을 고려하여 전역 왜곡을 다시 계산합니다. 언제든지 구속 조건을 추가하고 클릭 할 수 있습니다 Warp 새 데이터를 다시 통합하십시오. |
|
|
|
|
워프 전 구속 조건. |
결과 워프. |

추적 제약
제한된 영역은 샷을 통과 할 가능성이 있으므로 정확도를 유지하기위한 추가 키 프레이밍 작업이 필요합니다. C_GlobalWarp의 추적 기능은 일부 작업을 자동화하여이 프로세스 속도를 높일 수 있습니다. 트랙을 개별 C_Tracker 노드로 내 보낸 다음 복잡한 시퀀스를 위해 다듬어 진 트랙을 다시 가져올 수 있습니다.
| 1. | 평소와 같이 구속 조건을 추가하십시오. 예를 들면 다음과 같습니다. |
보다 구속 조건 추가 자세한 내용은.
| 2. | 추적하려는 구속 조건을 선택하십시오. Properties 패널 Line 표. |
| 3. | 설정 Frame Range 추적하고 싶습니다. 개별 구속 조건의 프레임 범위가 업데이트됩니다. |
| 4. | 딸깍 하는 소리 Track 선택한 구속 조건 추적을 시작합니다. |
노트 : 클릭하면 Track 설정하지 않고 Frame Range, Enter tracking range 범위를 지정할 수있는 대화 상자가 표시됩니다.
C_GlobalWarp는 프레임 범위에서 선택한 점을 추적합니다.
| 5. | 에서 추적 매개 변수를 조정할 수 있습니다 Properties 아래 패널 Settings > Tracking: |
• Step -추적 키 프레임 사이의 프레임 수를 설정합니다. 키 프레임 사이의 단계를 늘리면 처리 속도가 빨라지지만 정확도에 영향을 줄 수 있습니다.
• Patch Size -구속 점 주위의 이미지 패치 크기를 설정합니다. 패치 크기를 늘리면 트랙 품질이 향상되지만 패치가 클수록 처리 시간이 늘어납니다.
• Error Threshold -종료하기 전에 구속 조건 트랙이 허용 할 수있는 이미지 변경 임계 값을 설정합니다. 이 임계 값을 줄이면 이미지 변경에 더 잘 추적 할 수있어 더 긴 트랙을 만들 수 있습니다.
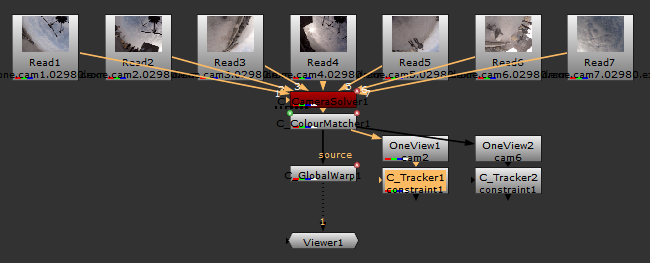
| 6. | 필요한 제약 조건을 선택하고을 클릭하여 트랙을 C_Tracker 노드로 내 보내서 결과를 더 향상시킬 수 있습니다 Export. |
각 제약 조건은 OneView 노드를 사용하여 뷰별로 내보내집니다. 예를 들어 cam2 과 cam6 이미지에 표시된 것과 유사한 노드 그래프를 생성합니다.
| 7. | C_Tracker 노드를 두 번 클릭하여 필요한보기에 대한 추적 키 프레임을 표시하십시오. |
보다 추적 및 안정화 CaraVR에서 C_Tracker를 사용하는 방법에 대한 자세한 내용은
| 8. | C_Tracker의 결과에 만족하면 C_GlobalWarp를 엽니 다. Properties 패널에서 내 보낸 구속 조건을 선택한 다음 Import. |
개선 된 트랙을 C_Tracker에서 가져 오면 정상적으로 이미지를 왜곡 할 수 있습니다. 보다 구속 조건 추가 자세한 내용은.
C_GlobalWarp 출력
C_GlobalWarp 's Cam Warp 컨트롤이 Unwarped 기본적으로 워프는 카메라 뷰 및 노드 트리에 전달 된 latlong 출력에 영향을 미치지 않고 워프를 stitch_map C_Stitcher가 최종 스티치에 영향을주기 위해 사용할 수있는 레이어.
다운 스트림 카메라 뒤틀림을 통과 시키려면 Cam Warp 제어하다 Warped. 그런 다음 워프가 적용된 개별 카메라 뷰가 렌더링됩니다.
또한 C_GlobalWarp는 C_CameraSolver의 리그 회전 메타 데이터를 덮어 씁니다. 뷰어 도구 모음에는 resetRotation 버튼을 사용하여 리그 회전을 메타 데이터에서 읽은 원래 값으로 재설정합니다. 그런 다음 C_Stitcher는 C_CameraSolver 메타 데이터와 동일한 방식으로 메타 데이터를 처리합니다. 보다 이미지를 함께 스티칭 자세한 내용은.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.