카메라 해결
추적 한 기능에 만족하면 카메라 위치를 해결할 수 있습니다. C_Tracker는 추적 정보를 사용하여 카메라 위치를 계산합니다. 카메라 위치는 안정화 또는 일치 이동에 사용됩니다.
| 1. | C_Tracker에서 Properties 패널에서 Solve Using 드롭 다운 메뉴에서 사용할 추적 데이터 유형을 선택하십시오. 자동 트랙을 만든 다음 일부 수동 트랙도 추가 한 경우 Combined. |
| 2. | 딸깍 하는 소리 Solve. |
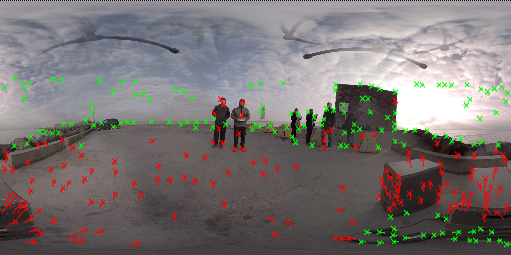
해결이 완료되면 뷰어에 해결 데이터가 적용된 추적 된 기능이 표시됩니다. 녹색 기능은 올바른 해석 데이터를 나타내고 빨간색 기능은 해석 데이터의 불량을 나타냅니다.
그만큼 Solve Error 해결의 전반적인 품질을 나타내는 좋은 지표입니다. RMS (루트 평균 제곱) 오류가 매우 높은 경우 추적 데이터를 수정하거나 일부 사용자 트랙을 추가하고 카메라를 다시 해결하는 것이 좋습니다. 보다 자동 추적 문제 해결 과 수동 추적 자세한 내용은.
| 3. | 해결에 의해 너무 많은 트랙이 거부되면, Error Threshold 또는을 사용하여 해결을 정제 Solve 에 컨트롤 Settings 탭. 보다 문제 해결 자세한 내용은. |
해결에 만족하면 변환 데이터를 사용하여 안정화 또는 일치 이동을 수행 할 수 있습니다. 보다 C_Tracker를 사용하여 안정화 자세한 내용은.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.