Dual Joint Planar IK
Inverse Kinematics, or IK, is a method of animating items in which software calculates the bending of a joint based on the position of a goal object. With Modo, the goal object is usually a locator. Once you have set up IK for a series of items, the IK hierarchy causes the item to continually reach for the goal when the goal item moves around and modifies the joint rotations as necessary. With IK, it is much easier to animate the position of one item (the goal) than to animate the rotations of several separate items. For example, to animate a hand on a doorknob with IK, the goal can be positioned at the door knob and the hand is in the proper place in the scene. With a standard hierarchy, both the shoulder and the elbow must be rotated independently to find the correct position for the hand. This is called Dual Joint as it affects two joints (for an arm, the shoulder and the elbow). With Dual Joint Planar, all 3 rotation axes must share a single axis plane. (Dual Joint Planar IK has its place, but you may also consider the more powerful Full Body IK system.)
Applying IK
To apply IK to a chain of items, first create the hierarchy. In this case, parent the 3 items to each other in a descending chain. Also, make sure the Center positions are in the proper location as well. For Modo to calculate the IK properly, all Center positions must share at least one axis value to appear in the same plane. Also, the centers for a chain of items cannot be positioned as a straight line. The chain must have a bend to it so that when Modo applies the IK, it can use a preferred angle for bending. Once the items are in order, select the items in descending order and then click the Apply IK button.
Once you apply the IK modifier to the chain, create a goal item and add a group locator as the overall parent for the IK chain. By moving this goal item, Modo modifies the angle of the joints in the IK chain.
Selecting the modifier item in the Item List displays the properties related to the IK chain.
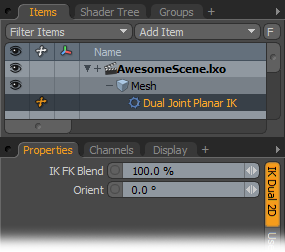
IK FK Blend: A setting of 100% fully uses the IK solution; values below 100% reduce the effect of IK on the chain; and, with a setting of 0%, IK is disabled.
Orient: By modifying this value, you can adjust the planar orientation angle of the IK chain. For example, for an arm, you could adjust the angle the elbow points toward.
Create IK Up Vector: This vector defines the up direction for an IK constraint and can help to keep the chain oriented properly during animation. The Create IK Up Vector button is similar to the Assign Up Vector command except that you don't need to create and position a locator. With the Create IK Up Vector, Modo generates the locator automatically based on the preferred bending angle. Once the new Up Vector locator is available, you can animate it to adjust the orientation of the IK rig. This is similar to adjusting the Orient setting in the IK properties panel.