The hinge constraint limits the rotation movement of an object to swivel as if fixed by a hinge joint, like that of a door. However, as a door hinge is limited by the collision of the opposing hinge plate, the hinge constraint offers unlimited rotation, much like a wheel axle. You can add a rotation range limit to the joint to produce the more limited motion of the door hinge. The hinge constraint is represented in the viewport as a circle around the point of rotation. Additionally, you can apply a motor force to the joint, making it possible to create wheels that spin and move items forward.
To apply a hinge constraint automatically, follow these steps:
| 1. | Select two items prior to invoking any of the constraint types. |
The first item selected represents the master or parent item and is defined as Body A in the constraint, the second item selected is the item that is constrained, also considered the auxiliary or child item, defined as Body B.
| 2. | With the items selected, in the Dynamics sub-tab, click on the Hinge constraint button. |
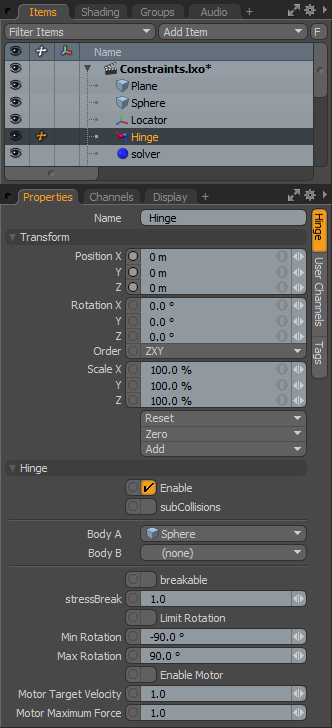
This adds the constraint item to the Items list.
The default center location of the hinge constraint is exactly halfway between the Body A and Body B objects with a line drawing to the centers of the constrained items. Depending on your intentions, this might not be the optimal position for the constraint. The motion of the child item (Body B) originates from the position of the constraint item itself, so it may need to be positioned appropriately.
|
Option |
Description |
|---|---|
|
Name |
Displays the current constraint item name. To change it, click on the field and type in the new name. |
|
Transform |
|
|
Position X/Y/Z |
These values represent the initial center for the constraint item in 3D world space, and the center of mass relative to the item it is constraining. Based on its initial position, once a dynamics simulation is invoked, the constraining item rotates and moves based on its initial (resting) position. |
|
Rotation X/Y/Z |
These values represent the initial (resting) rotation of the constraining item. |
|
Scale X/Y/Z |
These values have no direct effect on constraints. |
|
Hinge |
|
|
Enable |
Toggles the constraint item on or off. When enabled, the constraint item is considered during a dynamics simulation; when disabled, the constraint item is ignored. However, disabled constraints are persistent across Modo sessions, being saved with the scene, and retain their present settings. |
|
SubCollisions |
When enabled, allows constrained objects (especially those within a chain, not a literal chain, but subsequent groupings) to collide with one another. When disabled (the default state), fewer calculations are required, however, constrained items may inter-penetrate each other. If this occurs, enable SubCollisions. |
|
Body A |
Represents the item that another item is constrained to, the parent or master item. |
|
Body B |
Represents the item that is constrained, the child or auxiliary item. |
|
Breakable |
Allows constraints to be broken apart when a certain stress threshold is reached, defined by the Break Stress value. When the threshold is reached, the constraint no longer has any effect on the constrained item, leaving it to be affected by any other forces present in the simulation. |
|
Stress Break |
Determines the threshold when the constraint no longer affects the constrained item. The Breakable option must be enabled for this value to have any effect on the constraint. |
|
Limit Rotation |
The hinge is not initially limited in its rotation. By enabling this option, you can constrain the range of rotation that can be applied to the constraint, similar to the motion of a door hinge that is allowed to only swing so far. |
|
Min/Max Rotation Limit |
The Minimum value sets the lower extreme of the of the rotation clamping, while the Maximum value limits the upper extreme value. |
|
Enable Motor |
Normally, a hinge is only affected by the available forces in a dynamic simulation. This toggle allows you to apply a rotational force to the Body B item, making it spin around the hinge constraint's location. Speed of spinning is controlled by the mass of the connected objects, combined with the Motor Target Velocity and the Motor Maximum Force. |
|
Motor Target Velocity |
When this value is other than zero, it applies a rotational motion to the Body B item. Like a wheel, positive values rotate the item forward and negative values rotate it in reverse. The direction of the motion is based on the initial position of the constraint. The motor attempts to achieve the defined target velocity, taking into account forces, mass, and any collisions it encounters. |
|
Motor Maximum Force |
Determines the strength of how the motor reaches its target velocity and how it reacts to collision items. |