C_CameraSolver
C_CameraSolver allows you to calibrate your rig, building a model of the relationship between the cameras and producing a preview of the stitch. C_CameraSolver includes a list of rig presets that you can use as a starting point for a solve, such as the 6 camera Freedom360 and 14 camera H3PRO14. CaraVR also supports custom rigs that you calibrate manually and an import function for rigs created in PTGui and Autopano using the .pts and .pano formats.
|
|
|
|
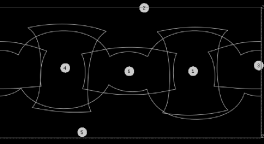
Freedom360 Rig |
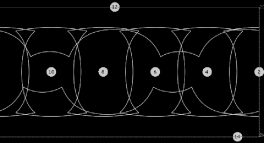
H3PRO14 Rig |
See Preparing Camera Rigs for more information.
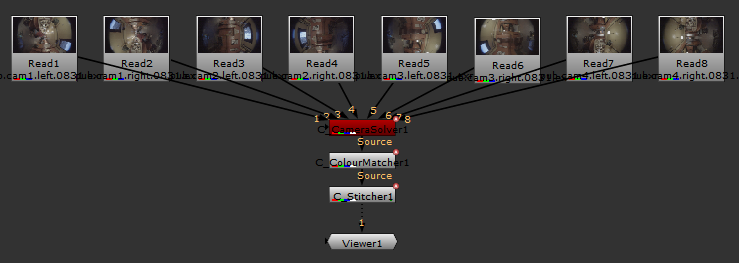
C_CameraSolver feeds metadata about the rig and the original source imagery downstream for later nodes to access, most importantly C_Stitcher and C_ColourMatcher. Both these nodes require this information to perform their tasks, making C_CameraSolver an engine tool, found at the top of every stitch script.
C_CameraSolver can build both nodal and spherical representations for the rig. Spherical rigs are often more physically correct. The solver can estimate rig layout and lens parameters from scratch if necessary, and offers a number of tools for fine-tuning and manually configuring the layout.
See Matching and Solving Cameras for more information.