Creating Points Clouds
GeoPoints creates a point cloud prim from its input. This is usually the simplest way to create a point cloud from inputs such as meshes and particles.
Note: GeoPoints is similar to the Classic 3D system DeepToPoints and PositionToPoints nodes, but wrapped into one.
The Points knob is where you can select the prim(s) to use for your point cloud. All Meshes may be a convenient option in order to turn your input mesh into a point cloud prim.
The Surface Point and Surface Normal knobs are for inputting channels that contain position or normal information. You can also populate this information using the two additional input pipes on the node.
You can then adjust the Point Size to your liking. Be aware that sometimes the default point scaling can get blocked by the mesh making it look as if no points have been generated so you may need to adjust this setting.
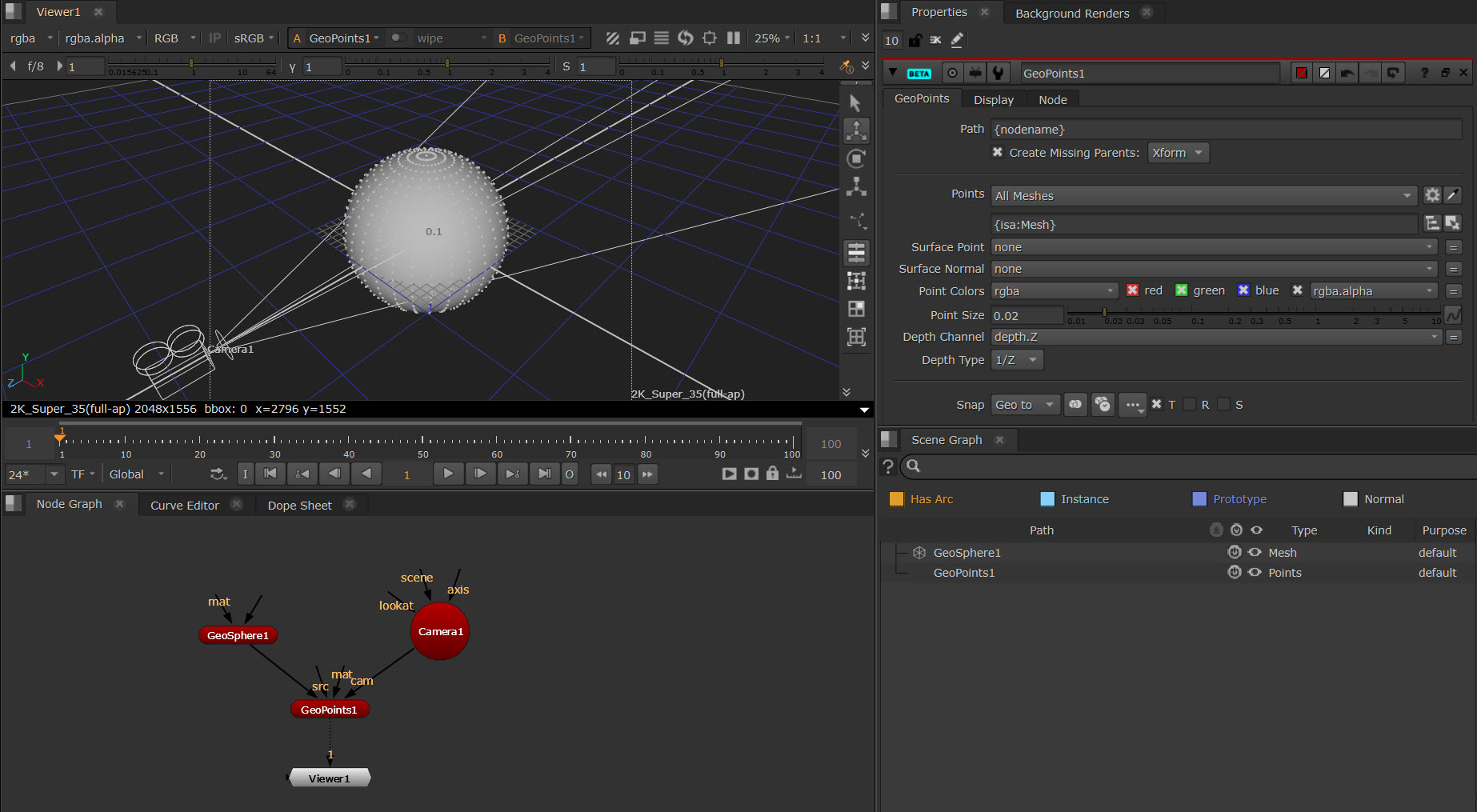
Here is an example of creating a point cloud from a sphere prim:
Tip: You can also use points clouds to generate a mesh (NukeX only). The GeoPointsToMesh node uses geometry normals to generate a mesh from a point cloud using Poisson Surface Reconstruction.
Note: There are also various nodes to use for Points Clouds with CameraTracker, such as GeoGeneratePoints, DepthGenerator, and DepthToPosition.
Note: CameraTracker, DepthGenerator and DepthToPosition can be used for both the Classic 3D System and the New 3D System.
Point Cloud Nodes - Node Reference
Creates a point cloud from its input.
Uses geometry normals to generate a mesh from a point cloud.
Point Cloud with CameraTracker Nodes - Node Reference
Create a dense point cloud camera tracker data.
Generates a depth map from camera tracker data.
Creates a 2D position (xyz) pass from camera tracker data.