FocusMatcher
Description
O_FocusMatcher is designed to correct subtle focus differences that are sometimes present between the left and right views of a stereo image. It does this by matching the focus distribution of one view to the other, based on the disparity vectors upstream. For details on how to calculate disparity vectors, see DisparityGenerator.
|
|
|
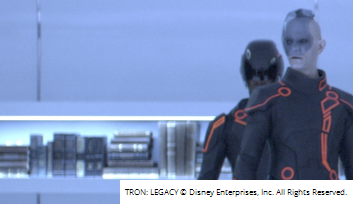
The original left view. |
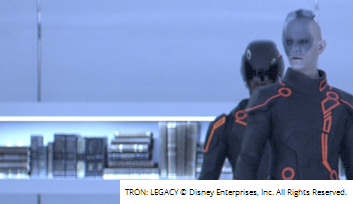
The corrected left view. |
The focus matching can be done using two different modes; the Match Edges mode and the Reconstruct Edges mode.
Note: Both modes require an O_DisparityGenerator node and an O_OcclusionDetector node upstream of the O_FocusMatcher node.
Match Edges Mode
The Match Edges mode matches the appearance of the edges from one view to the other. If you want to preserve the original image structure, it is recommended to use this mode. Also, if the blurring in your input images is subtle, the Match Edges mode may produce the best result.
Reconstruct Edges Mode
The Reconstruct Edges mode rebuilds the edges in one view from scratch, using the pixels from the other. If you want to rebuild focus exactly, or if the blurring in your image is heavy or varying, it is recommended that you use this mode.
Note: The result of this mode depends on the accuracy of the existing disparity vectors.