定位和旋转全身IK
反向运动学(IK)是一个可以定位和旋转目标项目的系统。IK层次结构链朝着这个目标迈进,以实现更快,更直观的动画工作流程。Modo提供易于设置和使用的“全身IK”选项。见全身IK设置有关设置链的信息的主题。
Solver
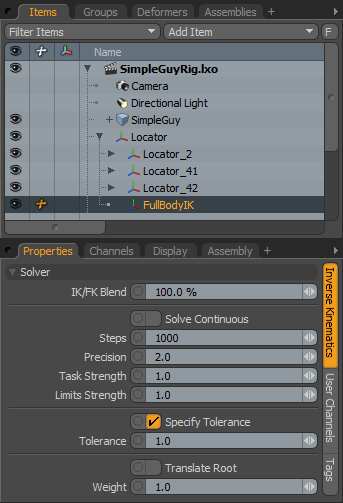
将任何IK链应用于层次结构时, Modo创建IK解算器项目并将其作为层次结构根的父项(默认情况下, FullBodyIK)。它具有控制整个链(包括根的所有子项)的IK的设置。
IK/FK Blend:控制IK解算器在多大程度上影响链。这会削弱全自动IK解决方案之间的相互影响100%向完全手动关键帧定位(FK) 0%。您需要先对处于驱动状态的项进行关键帧设置,然后再进行FK融合;否则,该项目 向最后一个关键帧位置插值。
Solve Continuous:指定IK解算是否从链的静止姿势开始(Off)或以前的IK解决方案( On )。差异是细微的,但是后者对于诸如尾巴或触手之类的东西可能是有效的。
Steps:表示IK解算器在尝试满足链上的所有任务并达到最终解决方案时进行评估的最大次数。如果IK解算器找到满意的解决方案 在达到最大步数之前,它会提前停止。
Precision:控制求解器的精确度 尝试匹配链上的任务。更高的值会降低阻尼,但需要更多的计算,并且可能会降低效率,具体取决于链条的复杂程度。较低的值会增加阻尼,并可能导致精度降低。
Task Strength:指定分配给该链的任务的整体强度,并确定任务对IK解算有多少影响。
Limits Strength:控制链上限制的整体强度。关节接近时Min要么Max旋转角度,它们变得更硬,旋转的可能性也较小。此设置的较低值会导致旋转阻尼减弱。较高的值会使关节的旋转急剧减小。对于非常简单的链,需要在限制生效之前提高此值。
Specify Tolerance:使用Tolerance解决时的价值(启用时)。停用后, Modo根据链的大小和复杂性及其任务在内部计算公差。
Tolerance:确定(启用时)在求解程序认为解决方案完成之前,需要多近的时间来匹配其任务。较低的值会导致关节更紧密地匹配其任务,但需要更多的步骤来计算。
Translate Root:指定(启用时)在求解IK时是否允许移动链根项目。
Weight:控制启用后根链自由移动的方式Translate Root。零(0)阻止它移动,但是1.0允许它自由移动。将此设置提高到1以上可增加根移动的可能性。
联合设置
Joint—
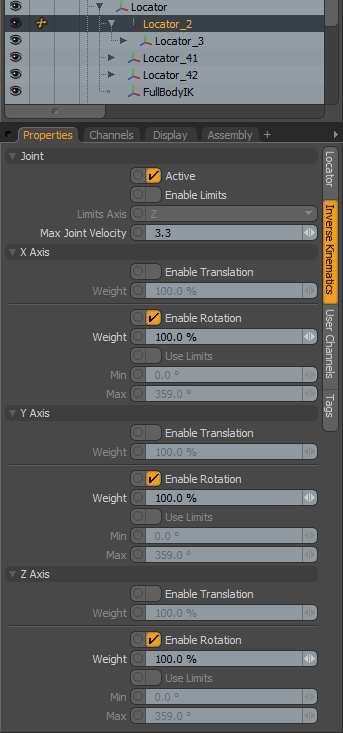
Active:指定(启用时)关节是否受IK解算影响。禁用此选项可使其忽略IK。
Enable Limits:指定在IK系统中的关节上是否应启用限制。您可以在关节上设置限制以限制其在每个轴上的旋转。
Limits Axis:指定任意设定限制的关节轴。在关节上设置限制时使用。通常,这是指向关节的第一个子关节的轴,通常是沿IK段延伸的轴。
Max Joint Velocity:调整关节可以为IK解算器的每次迭代进行的旋转量。值较大时,关节可以旋转更多。对于非常简单的链条(例如,两段式手臂或腿),请增加此设置,因为更少的关节可以分散旋转。在更复杂的链上,使用此方法可以减少将目标或任务移到遥不可及的距离时可能发生的抖动。
X/Y/Z Axis—
三个轴中的每个轴都为您提供相同的选项,以启用或禁用平移和旋转并限制移动量。
Enable Translation:允许(启用时)关节的子级在尝试达到其目标的同时沿当前关节的指定轴移动(这不适用于链根。)
Weight:控制联合翻译的数量: 0%禁用运动并100%允许完整运动。您可以将值增加到100%以上,以使运动更有可能-尤其是当多个关节具有Translation已启用。
Enable Rotations:切换指定轴上的旋转。
Weight:调整围绕指定轴的旋转自由度。在0%关节不旋转;在100%它可以完全旋转。将该值提高到100%以上会使该轴更可能旋转。
Use Limits:强制(启用时)IK仅在指定值内旋转,并在到达IK时产生硬停止。 Min要么Max值。
Min/Max:确定关节可以在其中旋转的范围。Modo仅在启用时使用这些限制 Use Limits。
任务选项
将目标添加到关节时, Modo添加Task目标关节的选项,您可以调整关节如何变化以达到目标。任务与目标相关,因为它们是关节保持位置或旋转(或两者)的指令。为一个Position Task,IK解算器将尝试将链项目保持在添加任务时该项目所在的“世界”位置。为一个Rotation Task,IK解算器将尝试使链项目保持与添加任务时相同的世界方向。
Position Task—
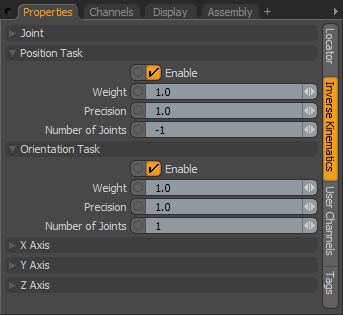
Enable:控制任务当前是否处于活动状态。
Weight:指定任务的强度以确定任务对链的影响。当链上有多个任务时,您可以使用它来使特定任务或多或少地影响解决方案。
Precision:控制求解器尝试将关节与其任务匹配的紧密程度。
Number of Joints:指定此任务影响的朝向根的关节数。设置-1影响所有关节。
Orientation Task—
Enable:控制任务当前是否处于活动状态。
Weight:指定任务的强度以确定任务对链的影响。当链上有多个任务时,您可以使用它来使特定任务或多或少地影响解决方案。
Precision:控制求解器尝试将关节与其任务匹配的紧密程度。
Number of Joints:指定此任务影响的朝向根的关节数。设置-1影响所有关节。