铰链约束
铰链约束将物体的旋转运动限制为旋转,就好像由铰链关节固定一样,如门的旋转运动。但是,由于门铰链受相对的铰链板的碰撞限制,因此铰链约束提供了无限的旋转,就像轮轴一样。您可以向关节添加旋转范围限制,以使门铰链产生更受限的运动。铰链约束在视口中表示为围绕旋转点的圆。此外,您可以向关节施加动力,从而可以创建使物体旋转并向前移动的轮子。
要自动应用铰链约束,请按照下列步骤操作:
| 1. | 在调用任何约束类型之前,请选择两个项目。 |
所选的第一项代表主项或父项,并定义为Body A在约束中,选择的第二个项目是受约束的项目,也被视为辅助项目或子项目,定义为Body B。
| 2. | 选择项目后,在Dynamics子标签,点击Hinge约束按钮。 |
这会将约束项添加到Items清单。
铰链约束的默认中心位置恰好在Body A和Body B画一条线到约束项目中心的对象。根据您的意图,这可能不是约束的最佳位置。子项的运动(Body B)源自约束项本身的位置,因此可能需要适当定位。
|
选项 |
描述 |
|---|---|
|
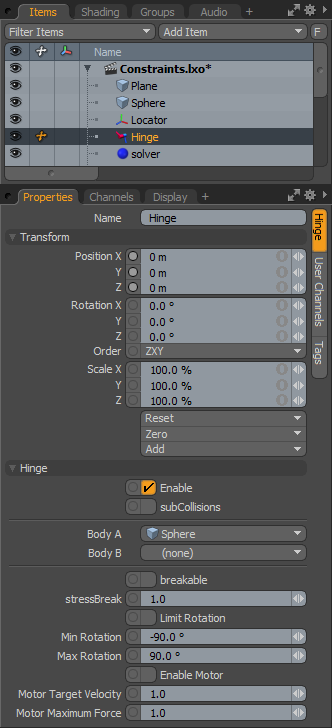
Name |
显示当前约束项名称。要更改它,请单击该字段,然后输入新名称。 |
|
Transform |
|
|
Position X/Y/Z |
这些值表示3D世界空间中约束项的初始中心,以及相对于其约束的项的质心。基于其初始位置,一旦调用了动力学模拟,约束项将基于其初始(静止)位置旋转并移动。 |
|
Rotation X/Y/Z |
这些值表示约束项目的初始(静止)旋转。 |
|
Scale X/Y/Z |
这些值对约束没有直接影响。 |
|
Hinge |
|
|
Enable |
启用或禁用约束项。启用后,将在动力学仿真过程中考虑约束项;禁用时,约束项将被忽略。但是,禁用约束在Modo会话,与场景一起保存,并保留其当前设置。 |
|
SubCollisions |
启用后,允许受约束的对象(尤其是链中的对象,不是文字链,而是后续的分组)相互碰撞。禁用时(默认状态),需要的计算较少,但是,受约束的项目可能会相互渗透。如果发生这种情况,请启用SubCollisions。 |
|
Body A |
表示另一个项目所约束的项目,即父项目或主项目。 |
|
Body B |
表示受约束的项目,子项目或辅助项目。 |
|
Breakable |
当达到某个应力阈值时,允许打破约束,该阈值由Break Stress值。达到阈值后,约束将不再对约束项产生任何影响,而使其受到模拟中存在的任何其他力的影响。 |
|
Stress Break |
确定约束不再影响受约束项目时的阈值。的Breakable必须启用选项,此值才能对约束有任何影响。 |
|
Limit Rotation |
铰链最初不受旋转限制。通过启用此选项,您可以限制可应用于约束的旋转范围,类似于仅允许摆动那么远的门铰链的运动。 |
|
Min/Max Rotation Limit |
的Minimum值设置旋转夹紧的下限值,而Maximum值限制最大值。 |
|
Enable Motor |
通常,铰链仅受动态模拟中的可用力影响。通过此切换开关,您可以向Body B项,使其绕铰链约束的位置旋转。旋转速度受连接物体的质量控制,并与Motor Target Velocity和Motor Maximum Force。 |
|
Motor Target Velocity |
当该值不为零时,它将旋转运动应用于Body B项目。像轮子一样,正值使项目向前旋转,负值使项目反向旋转。运动的方向基于约束的初始位置。电机会在考虑到力,质量以及遇到的任何碰撞的情况下尝试达到定义的目标速度。 |
|
Motor Maximum Force |
确定电机达到目标速度的方式以及对碰撞项目的反应强度。 |