使用DepthToPoints节点创建点云
DepthToPoints是一个包含DepthToPosition和PositionToPoints节点的Gizmo。它可用于从深度传递和3D相机生成3D点云。DepthToPoints获取图像文件中包含的深度数据和颜色信息,并将图像重新创建为3D点云。
使用DepthToPoints创建点云
|
1.
|
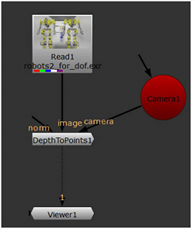
来自3D > Geometry菜单,选择DepthToPoints将gizmo添加到脚本中。 |
|
2.
|
通过深度读取读取图像并将其连接到image Gizmo的输入。 |
|
3.
|
来自3D 菜单中,选择一个Camera并将其连接到camera DepthToPoints的输入。 |
|
4.
|
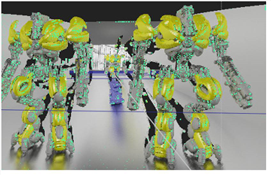
在DepthToPoints User标签,从depth下拉式菜单。如果您的频道包含普通频道,请从surface normal下拉菜单,或将包含普通数据的图像连接到norm节点的输入。现在,您应该在3D查看器中看到点云。 |
|
5.
|
要更改点数,请调整point detail滑块。值为0表示不显示任何点。值1显示所有可用点。 |
|
6.
|
要更改点的大小,请调整point size滑块。 |
小费: 如果您在查看图像和点云时遇到问题,请确保图像的Alpha值未设置为黑色。