解决问题
CameraTracker有几种故障排除工作流程可用于提高求解精度,但最终,好的求解依赖于好的跟踪数据。
使用曲线阈值删除轨迹
您可以在AutoTracks标签以动态拒绝曲目并删除它们以提高准确性。使用error - rms曲线为例:
| 1. | 点击AutoTracks标签中的属性,然后选择error - rms曲线。 |
小费: 按F曲线显示中的,使选定的音轨适合可用的屏幕空间。
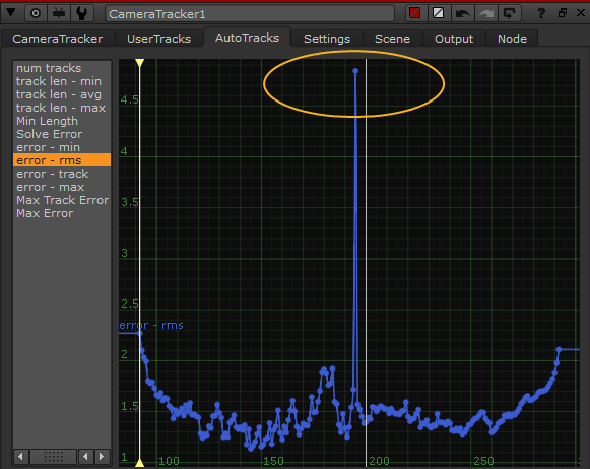
在示例中,您可以看到误差曲线在第195帧附近显着增加。
| 2. | 将Viewer播放头移动到受影响的区域,并检查Viewer中的跟踪功能。 |
| 3. | 如果减少Max Track Error在“属性”面板中单击“控制”,您将开始看到轨道低于阈值时变成红色。 |
|
|
|
| Max Track Error设置为6。 | Max Track Error设置为2。 |


| 4. | 请点击Delete Rejected删除所有低于指定阈值的轨道。 |
小费: 您还可以通过以下方法手动删除轨道:在查看器中选择它们,右键单击并选择tracks > delete selected。
| 5. | 然后,您可以通过以下方法解决受影响的帧范围Update Solve。 |
| 6. | 使用Settings标签Solving控制项: |
• Camera motion -设置在解决计算中CameraTracker应考虑的摄像机运动。
• Keyframe Separation -调整关键帧之间的间隔值。
高分离值会产生较少的关键帧,且散布更大,通常用于较慢的相机运动。
较低的值会生成更多具有更紧密分布的关键帧,通常用于快速摄像机运动。
注意: 启用后, Reference Frame控件确定放置第一个关键帧的位置。
• Smoothness -较高的值可以通过增加“权重”来消除路径,从而有助于平滑相机路径。
• Reference Frame -允许您指定更新相机解像的起始帧,以及确定第一个关键帧的放置位置。
注意: 校验Set reference frame启用此控件。
完善解决方案
在AutoTracks 标签,在Refinement部分中,有三种优化控件可帮助您改进求解。如果Error和per frame控制CameraTracker选项卡显示相对较高的值,请尝试使用常规轨道优化求解。内线由曲线阈值定义,可以细化焦距,摄像机位置或摄像机旋转(或这些的组合)。您可以先在Output标签,然后选择:
• Focal Length -检查以细化相机的焦距。
• Position -检查以缩小相机位置。
• Rotation -检查以改善相机的旋转角度。
最后,点击Refine Solve。