导出到预设节点
C_Stitcher包含一个Export下拉菜单,它会自动添加预设脚本组件,使您可以快速创建常见VR任务的节点树。
从下拉列表中选择所需的操作,然后单击Create将脚本添加到节点图:
• STMap (split) -创建一个包含stitch_map针迹中所有视图的通道。您可以从C_Stitcher输出中检查各个视图,方法是选择查看器上方的视图,然后选择stitch_map来自的频道channels落下。
• STMaps (separate) -创建一个单独的C_STMap节点,其中包含一个stitch_map通道,用于针迹中的每个视图。
此导出类似于STMap (split),但使用OneView节点将视图分离为单独的流。
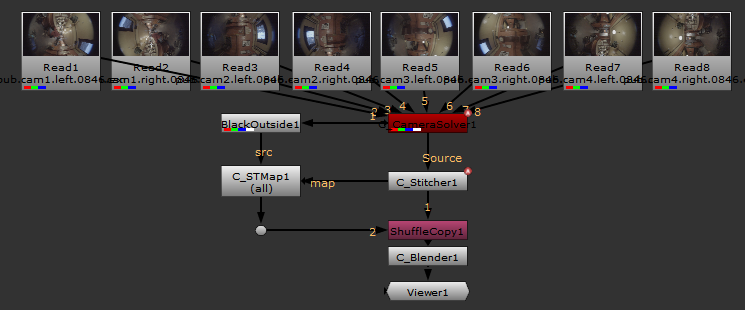
• Manual STMap Stitch (split) -创建一个工作流程,以通过单个C_STMap包含来自C_CameraSolver的原始输入进行变形, stitch_map针迹中所有视图的通道。然后将视图传递给C_Blender创建针脚。
• Manual STMap Stitch (separate) -创建工作流以通过单独的C_STMaps扭曲来自C_CameraSolver的原始输入,其中包含stitch_map通道,用于针迹中的所有视图。然后使用JoinViews重新组合视图,并将最终输出传递给C_Blender来创建针脚。
此导出类似于Manual STMap Stitch (split),但每个视图使用两个OneView节点将视图分离为单独的流:一个用于C_CameraSolver视图,一个用于C_STMap转换信息。
• PPass (split) -创建一个包含ppass_map针迹中所有视图的通道。您可以从C_Stitcher输出中检查各个视图,方法是选择查看器上方的视图,然后选择ppass_map来自的频道channels落下。
• PPass (separate) -创建一个单独的C_STMap节点,其中包含一个ppass_map通道,用于针迹中的每个视图。
此导出类似于PPass (split),但使用OneView节点将视图分离为单独的流。
• Manual PPass Stitch (split) -创建一个工作流程,以通过单个C_STMap包含来自C_CameraSolver的原始输入进行变形, ppass_map针迹中所有视图的通道。然后将视图传递给C_Blender创建针脚。
• Manual PPass Stitch (separate) -创建工作流以通过单独的C_STMaps扭曲来自C_CameraSolver的原始输入,其中包含ppass_map通道,用于针迹中的所有视图。然后使用JoinViews重新组合视图,并将最终输出传递给C_Blender来创建针脚。
此导出类似于Manual PPass Stitch (split),但每个视图使用两个OneView节点将视图分离为单独的流:一个用于C_CameraSolver视图,一个用于C_STMap转换信息。