使用Facebook环绕声数据进行合成
CaraVR的Facebook Surround工具集使您可以快速提取深度信息,以构建点云,以与深度相关的工作流一起使用。深度数据对于准确定位3D元素然后通过RayRender渲染为2D尤其有用。
设置工具集:
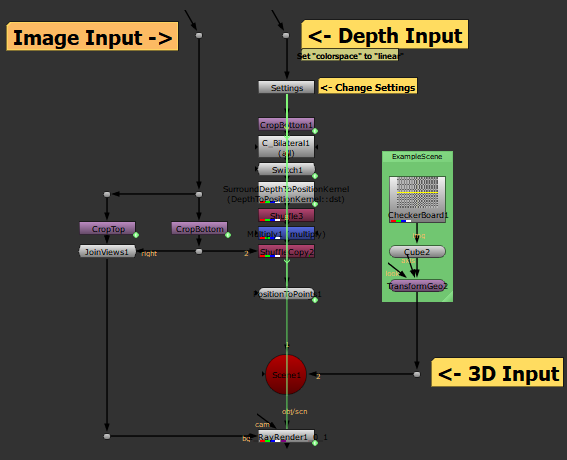
| 1. | 导航CaraVR > Toolsets > Facebook_Surround_Depth_To_Points。 |
预设的节点树将添加到“节点图”中。
| 2. | Nuke提示您创建左视图和右视图(如果您的脚本中不存在)。 |
| 3. | 将源图像连接到Image Input和深度信息Depth Input。 |
注意: 确保Depth Input读colorspace设定为linear。
| 4. | 将查看器连接到“读取”节点以查看深度数据。较暗的区域距离钻机更近,而较亮的区域距离钻机更远。 |
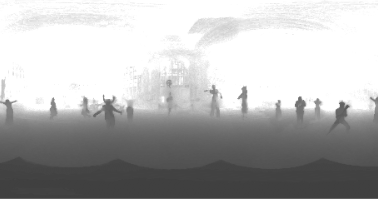
在示例中,字符在前景中,而集合在背景中。
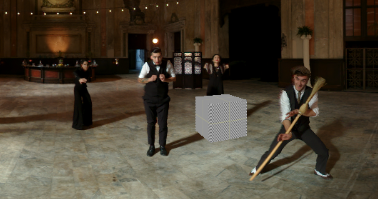
| 5. | 将查看器附加到RayRender节点以查看场景。 |
深度数据和相机数据然后由BlinkScript内核处理,转换为点云,然后传递到RayRender。
默认工具集将一个多维数据集添加到场景,使用注入的数据将其精确定位。您可以交换示例几何图形以测试场景中的其他对象。
| 6. | 您还可以通过按3D Viewer检查场景Tab。使用标准在360°场景中导航Nuke导航控件: Ctrl/Cmd旋转相机并Alt平移。 |


| 7. | 调整“设置”节点中的值以控制点云的外观: |
• Eye Separation -从查看者的角度确定两个视图的距离(以米为单位)。如果将“眼间距”或瞳孔间距离(IPD)设置得太低,则场景中的对象似乎会被水平挤压,但是将其升高得太高则会在针迹中留下孔。
• Point Details -控制点云中的点数。较高的值需要更长的渲染时间。
• Cutoff -以米为单位设置深度,超过该深度将从点云中省略点。减小该值将删除距装备更远的点。
• Filter Depth Map -启用后,将双边过滤器应用于深度图,以防止出现步进伪影。
• ZInv Depth Encoding -启用后,使用ZInv深度编码来反转图像中表示深度的方式,从而提供更平滑的深度图。反转会将图像中的较小值视为较大的深度,而不是将较小值等于较小深度的默认值。