通过动画摄影机定位3D点
在第三方应用程序(例如Maya)中创建的动画摄影机,或Nuke的CameraTracker包含足够的视差信息,可使用PointsTo3D节点在2D场景中定位3D点。PointsTo3D在图像序列中使用三个参考帧来推断2D点在3D空间中的位置。
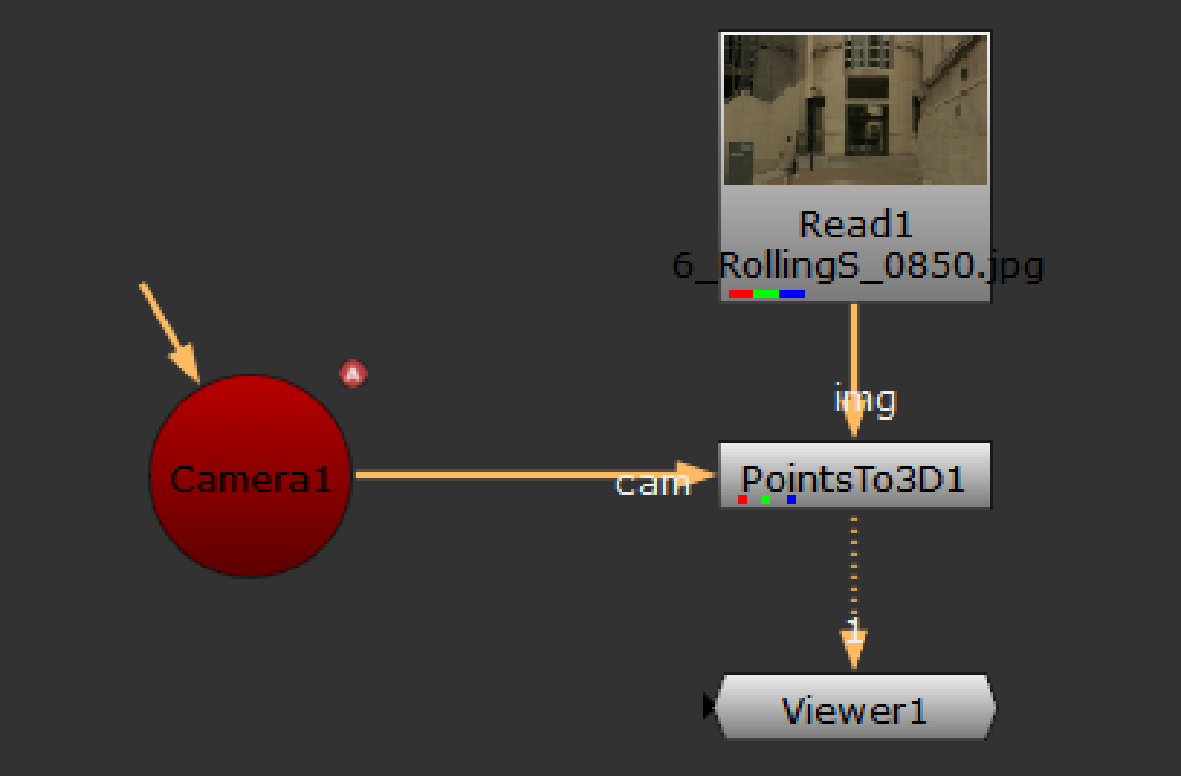
连接PointsTo3D节点
小费: NukeX和Nuke Studio包括CameraTracker,它可以创建动画相机而无需借助第三方应用程序。看到相机追踪了解更多信息。
|
| 3.
|
在界面左侧的工具栏中,导航至Transform > PointsTo3D添加PointsTo3D节点。 |
|
| 4.
|
将图像序列和相机连接到PointsTo3D节点,然后连接查看器。 |
设置参考框架
|
| 1.
|
在里面Properties面板,套装Camera type至free move。 |
|
| 3.
|
滑动到显示特征的第一个参考帧,然后将pointA从查看器左下角到功能位置的查看器小部件。 |
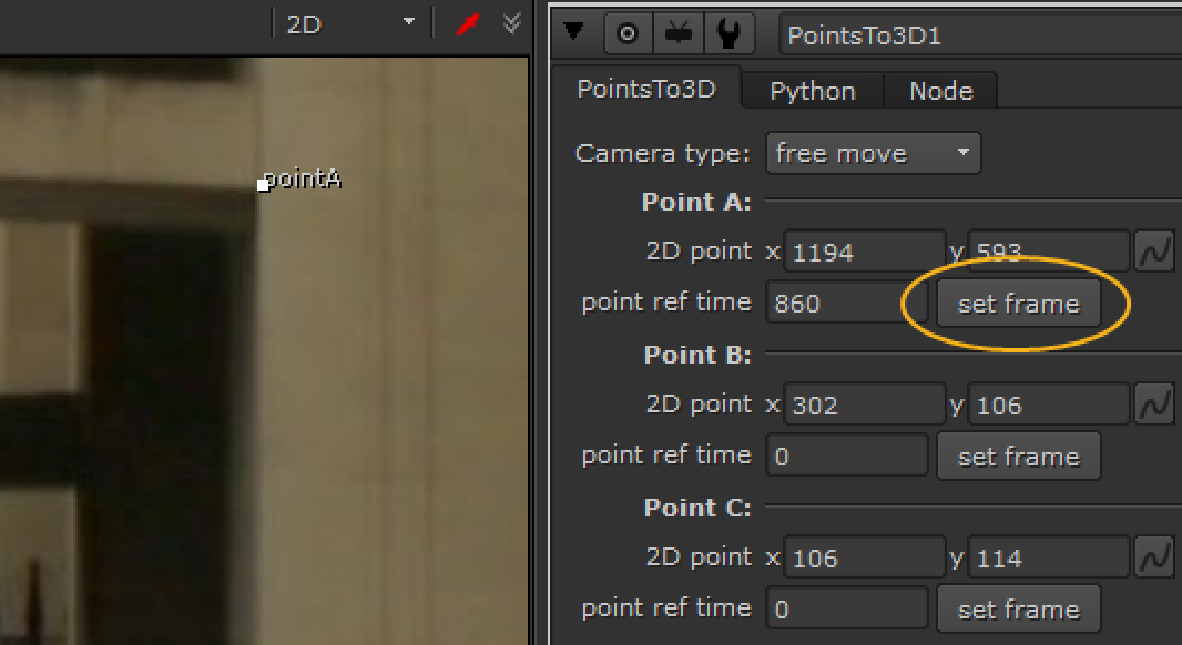
将2D坐标和参考帧号插入到Point A控件。
小费: 您可以使用来调整2D点x和y控件中的像素完美定位属性。
|
| 5.
|
滑动到第二个参考框,在其中可以看到您的特征,然后拖动pointB从查看器左下角到功能位置的查看器小部件。 |
|
| 7.
|
滑动到显示您的特征的第三个参考框架,然后将pointC从查看器左下角到功能位置的查看器小部件。 |
现在,您可以在属性中查看所有三个参考框架的坐标和框架信息。
计算3D位置
|
| 2.
|
点击Frame range下拉菜单以选择范围边界和要计算的帧(如果需要)。 |
|
| 3.
|
要使用较低的分辨率从图像序列计算位置,请启用Use proxy。这样可以加快计算速度,但是结果可能不那么准确。 |
|
| 4.
|
如果过程中发生错误,要停止计算,请禁用Continue on error。 |
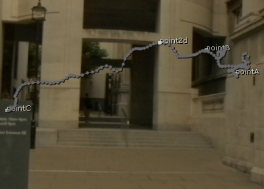
Nuke在整个序列中运行,针对三个参考帧跟踪2D位置以确定相应的3D点。
计算完成后, point2d Viewer小部件放置在2D空间中的跟踪点上。
|
| 6.
|
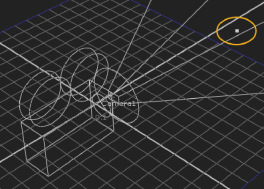
按Tab在查看器中切换到3D透视图。计算出的3D点在3D空间中突出显示。 |
|
|
|
用于计算
3D位置。 |
在3D查看器中的最终位置。 |
您可以使用计算出的3D点来帮助您将元素放置在场景中,或单击generate axis添加一个Axis节点来一起控制场景中的所有元素。看到父母到轴对象有关轴的更多信息。
