查看求解数据
将求解数据放置在查看器中后,您可以放大以更清晰地显示点。您可以使用来控制查看器中显示的内容Display控制Settings标签:
• Show tracks -显示或隐藏2D跟踪信息。
• Show projected 3D points -显示或隐藏3D点的2D位置。
• Show key tracks only -仅显示用于计算解算的最长轨道。
• Show 3D marker -在3D查看器的每个点上显示或隐藏3D标记。
红绿灯方案适用于2D轨道,以帮助找到合适的阈值以排除轨道中的轨道。 AutoTracks标签-默认情况下为琥珀色,绿色为良好轨道,红色为较差轨道。
圆和十字将重新投影为已解决的自动跟踪。3D点圆离特征点越近,求解越好。
将鼠标悬停在一个点上以显示其求解信息。

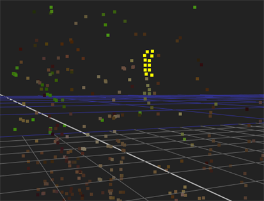
CameraTracker还在3D Viewer中创建一个点云,使您可以交叉检查2D和已求解3D点的相对位置。在2D中选择一些点,然后按Tab在查看器中切换2D和3D空间以检查点位置。
|
|
|
| 在2D序列中选择了几个点。 | 在3D查看器中显示的相同点。 |

查看自动跟踪曲线
详细的求解信息显示在属性面板上的曲线中。 AutoTracks标签。您可以一次选择所有求解曲线,也可以获取单个曲线的更详细视图,例如error - rms (均方根)。
小费: 紧迫F将重点放在一条曲线上可在可用空间中最大化所选曲线。
|
|
|
| 选择所有求解曲线。 | 绘制一条曲线。 |
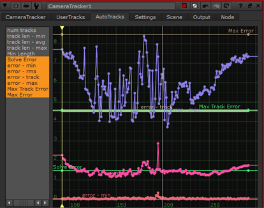
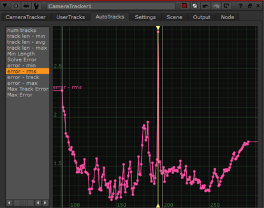
曲线可以指示序列中解决遇到的问题的区域。例如,右侧的均方根误差曲线在当前帧上显示出明显的斑点,如播放头位置所示。在这种情况下,您可以尝试调整Keyframe Spacing要么Smoothness并更新解决方案。看到解决问题
图中的曲线显示以下求解信息:
• Solve Error -显示常数SolveError参数。
• error min -每帧的最小重新投影误差(以像素为单位)。
• error rms -每帧的均方根重投影误差(以像素为单位)。
• error track -在每帧的轨道寿命中计算出的最大均方根最大投影误差(以像素为单位)。
• error max -每帧的最大重投影误差(以像素为单位)。
• Max Track Error -显示恒定的最大RMS误差参数。
• Max Error -显示最大错误阈值参数。
查看解决的用户跟踪
解决了用户跟踪后,您可以在UserTracks标签。如果错误很大,请尝试查看2D x,y特征轨迹。或者,您可以取消选中用户跟踪的e (启用)列将其从场景中删除,然后单击Solve再次。
表格以及3D查看器中还显示了用户跟踪的3D位置(X,Y,Z)。
小费: 您可以在解决相机问题后创建用户轨迹,以提取镜头中的特定3D位置。为了产生准确的3D点,必须在3个或更多具有良好视差的帧中定义用户轨迹。创建用户跟踪后,请在“用户跟踪”表中将其选中,然后点击Update XYZ按钮从当前求解中三角剖分3D位置。
小费: 自动跟踪后,您可能需要选择一个自动跟踪并将其提取为用户跟踪。这向求解器暗示这是一条重要的轨道,应加以限制。如果场景的特定部分无法正确解决,则这特别有用,尽管自动跟踪在该区域中似乎已很好地跟踪了。
有关更多信息,请参见提取用户跟踪。
预览Matchmove质量
计算完解算后,您可能希望通过预览添加到3D场景中的对象在素材上的粘附程度来查看其质量。如果您设定Lens Distortion至Unknown Lens创建解决方案之前,有两种方法可以执行此操作:
方法1
| 1. | 在2D Viewer中,右键单击一个轨迹点(或几个选定的点,最好在同一平面上),然后选择create > cube, 例如。 |
CameraTracker创建一个Cube节点,并将其放置在所选点的平均位置。您将使用多维数据集来测试其对输入素材的坚持程度。
小费: 如有必要,您可以使用uniform scale多维数据集属性中的控件。
| 2. | 在CameraTracker属性中,设置Export菜单Scene+然后点击Create。 |
CameraTracker创建一个3D场景,其中的Camera,PointCloud,ScanlineRender和LensDistortion节点设置为不失真输入。
| 3. | 将“多维数据集”节点连接到“场景”节点的输入之一。 |
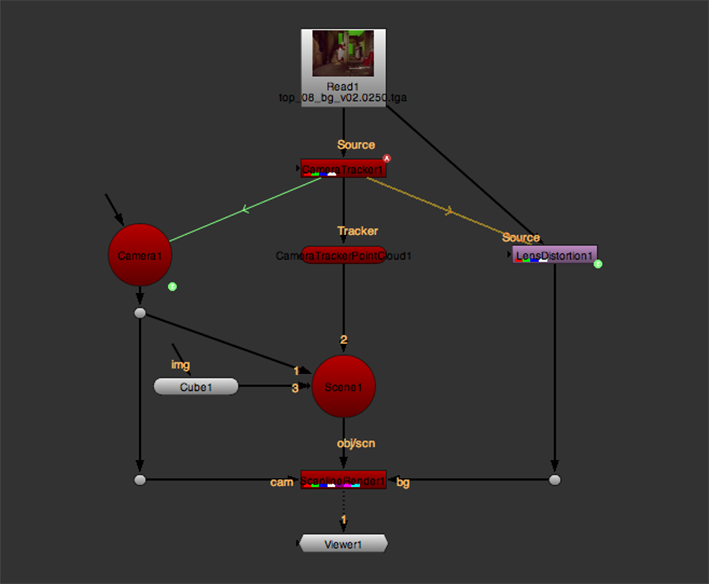
| 4. | 查看ScanlineRender的输出。 |
您在步骤1中创建的多维数据集和生成的点云CameraTracker将显示在2D Viewer中未失真素材的顶部。

| 5. | 在时间轴上滑动以查看多维数据集和点云是否坚持素材。如果有,请删除不再需要的任何节点(例如“多维数据集”节点),然后继续执行以下操作调整场景。如果没有,请继续解决问题。 |
方法2
| 1. | 在CameraTracker属性中,设置Export菜单Camera然后点击Create。 |
CameraTracker创建一个Camera节点,该节点模拟场景中使用的摄像机。
| 2. | 在2D Viewer中,右键单击一个轨迹点(或几个选定的点,最好在同一平面上),然后选择create > cube, 例如。 |
CameraTracker创建一个Cube节点,并将其放置在所选点的平均位置。您将使用多维数据集来测试其对输入素材的坚持程度。
小费: 如有必要,您可以使用uniform scale多维数据集属性中的控件。
| 3. | 启用Undistort Input。 |
CameraTracker可以消除输入镜头中的镜头失真。
| 4. | 确保同时打开CameraTracker和Camera属性面板。 |
| 5. | 按Tab在查看器上切换到3D视图。 |
| 6. | 将“查看器”右上角的“照相机通过菜单”设置为您在步骤1中创建的照相机,然后单击 |
| 7. | 在“查看器”顶部,将“查看器”组合下拉菜单设置为over,这样您就可以在同一CameraTracker节点上查看CameraTracker节点。 |
这会将CameraTracker当前未失真的输入图像覆盖在3D Viewer中的点云上。

| 8. | 在时间轴上滑动,以查看您在步骤2中创建的多维数据集和CameraTracker生成的点云是否坚持素材。如果有,请删除不再需要的任何节点(例如“多维数据集”节点),然后继续执行以下操作调整场景。如果没有,请继续解决问题。 |
抱歉,您没有找到此帮助
为什么这没有帮助? (检查所有适用)
感谢您抽出宝贵时间给我们反馈。
