Exporting to Preset Nodes
C_CameraSolver includes an Export dropdown, which automatically adds preset script components allowing you to quickly create node trees for common VR tasks.
Select the required operation from the dropdown and then click Create to add the script to the Node Graph:
• Cameras - creates Camera nodes, attached to an Axis and Scene, for each camera in the rig.
Note: The Axis node contains any global rotations you applied to the rig.
|
|
|
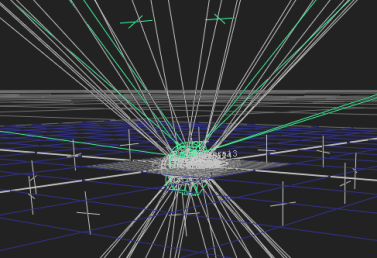
This option allows you to examine the orientation and field of view for each camera in the rig in Nuke's 3D Viewer.
If you're solving rigs with extreme fisheye focal lengths, Nuke displays a warning message.

This occurs when Nuke can't automatically convert the focal length to rectilinear. In this case, you can export using the Camera Ingest option described below, to pass through the focal length unchanged, allowing you to ingest extreme fisheye camera data without issues.
• Transforms (split) - creates a single C_SphericalTransform containing rotation data for each camera in the rig. Click through the views above the Viewer to examine the rotation of each camera.

In the Properties panel, open the Rotation Angles control to see the rotation information for each view.
Note: C_Stitcher can stitch cameras together from the exported transforms without the need for a C_CameraSolver in the script. See Stitching Pre-Projected Images Together for more information.
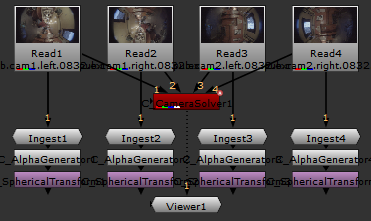
• Transforms (separate) - creates separate rotation data for each view using a OneView and C_SphericalTransform node for each camera in the rig.
This export is similar to Transforms (split), but the views are separated out into individual streams.
Note: C_Stitcher can stitch cameras together from the exported transforms without the need for a C_CameraSolver in the script. See Stitching Pre-Projected Images Together for more information.
• Manual 2D Stitch - creates a RigWorkflow2D group containing a C_SphericalTransform for each view, passed into a JoinViews and C_Blender node to re-assemble the views into a coherent whole.
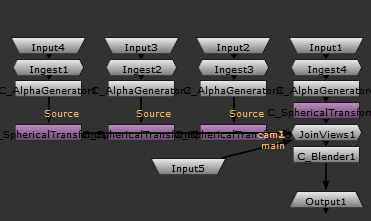
The AddMaskGenerator nodes for each view allow you to adjust the masks used to stitch views together, giving you more control over coverage and feathering between matched camera pairs.
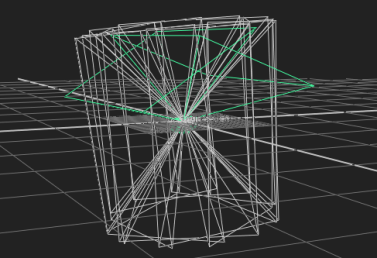
• Manual 3D Stitch - creates a RigWorkflow3D group containing a C_SphericalTransform and Camera for each view, projected onto a Sphere and rendered through C_RayRender.
Note: Projections in Nuke's 3D system expect rectilinear footage, which is inherently limited to a 180° field of view. As a result, C_CameraSolver's manual 3D workflow is not applicable to rigs using fisheye lenses.
• Ingest (joined) - creates ShuffleView nodes for all inputs, allowing you to assign inputs to views manually and then joins the views together. Double-click the ShuffleView node for an input to specify which view to output using the get and from controls.
• Ingest (separate) - creates Ingest groups containing ShuffleView and OneView nodes for all inputs, allowing you to assign inputs to views manually. Double-click the ShuffleView node for an input to specify which view to output using the get and from controls.
This export is similar to Ingest (joined), but the views are separated out into individual streams.
• Contact Sheet - creates a ContactSheet containing all solved views for review purposes.
• Camera Ingest - automatically creates Camera nodes for each view, including an Axis node containing any global rotation, and links the images and cameras to a C_CameraIngest node.
This export option sets the Cameras > Focal Length control to Default (pass through), allowing you to pass through focal lengths unchanged to ingest extreme fisheye cameras without issues.
See C_CameraIngest for more information.