C_CameraIngest
C_CameraIngest takes manually solved or pre-tracked footage from third-party applications and adds CaraVR metadata to the stream to build a model of the relationship between the cameras to pass to the stitcher or as the basis for further refinement with the C_CameraSolver.
You can also use C_CameraIngest with cameras exported from C_CameraSolver, see Exporting to Preset Nodes for more information. The Axis node associated with the Camera nodes contains any global rotation applied to the rig.
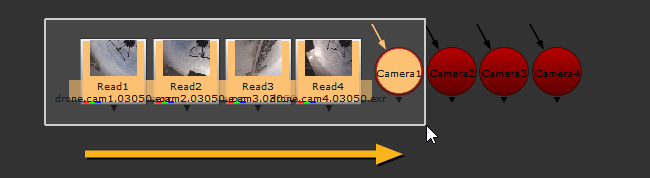
| 1. | Read in your image sequences and camera data using Nuke's standard Read and Camera nodes. |
| 2. | Select all the Read nodes and Camera nodes in order to ensure that the inputs are connected up correctly. |
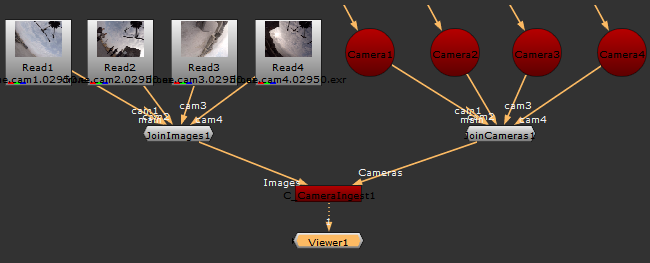
| 3. | Add a C_CameraIngest to the Node Graph. |
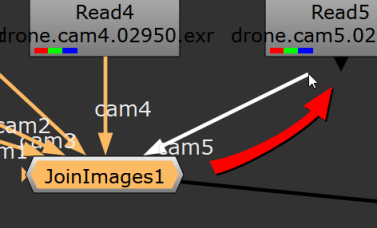
CaraVR connects all your images and cameras to the C_CameraIngest node using JoinViews nodes with modified names, JoinImages and JoinCameras.
Note: If you selected the nodes in the wrong order, you may need to manually reconnect the node inputs.
| 4. | Connect a Viewer to the C_CameraIngest node to display the main view. |
| 5. | Click Camera Views > Create to add more views, if required. |
The Create Camera Views dialog is displayed.
| 6. | Enter the number of views you want to create. For example, if the script already contains four views, entering seven in the dialog creates three new views. |
Note: Entering a number less than the current number of views deletes the extra views from the script.
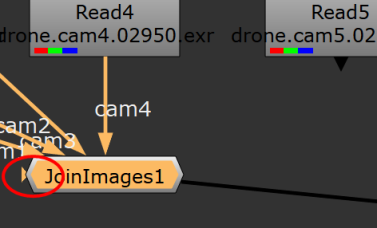
The additional image and camera inputs are added to the left-hand side of the JoinImages and JoinCameras nodes, drag-and-drop them to connect the inputs as normal.
|
|
|
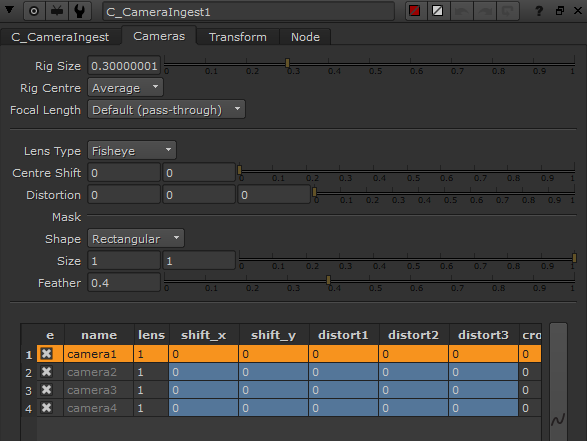
Note: Camera nodes in Nuke don't include lens distortion controls, so C_CameraIngest includes a cameras table in the Properties panel on the Cameras tab, similar to that found in the C_CameraSolver controls.
| 7. | Set the Converge control to the depth at which the cameras overlap, allowing you to bring a single point of interest in the scene into focus. |
Note: The Converge control has no effect on Nodal Layouts.
| 8. | You can then pass the result to a C_Stitcher or C_CameraSolver for further refinement. See C_Stitcher and C_CameraSolver for more information. |
Extreme Fisheye Focal Length
Nuke can't automatically convert extreme fisheye focal lengths to rectilinear. If you attempt to export some fisheye cameras from C_CameraSolver, a warning message is displayed.

In this case, you can use C_CameraIngest to pass through the focal length unchanged, allowing you to ingest extreme fisheye camera data without issues.
Note: The Camera Ingest option described in Exporting to Preset Nodes create Camera nodes with unconverted fisheye focal lengths from C_CameraSolver.
The Focal Length control in the Properties panel, Cameras tab allows you to pass through the focal length unchanged, instead of automatically converting it to rectilinear.
Default (pass-through) is the default setting for the Focal Length control. You can then select a camera in the matrix on the Cameras tab and enter camera information to improve the result.