Generating Disparity Vectors
The C_DisparityGenerator node is used to create disparity maps for stereo images. A disparity map describes the location of a pixel in one view in relation to the location of its corresponding pixel in the other view. It includes two sets of disparity vectors: one maps the left view to the right, and the other maps the right view to the left.
Note: C_DisparityGenerator differs from the Ocula version in that it can project in latlong space, meaning disparity vectors are mapped as they pass the edge of the frame when the image wraps around.
The final disparity vectors are stored in disparity channels, so you might not see any image data appear when you first calculate the disparity map. To see the output inside Nuke, select a disparity channel from the channels controls in the top-left corner of the Viewer.
|
|
|
|
The source image. |
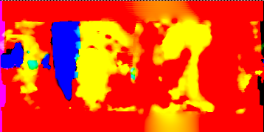
The associated disparity vectors. |

C_DisparityGenerator also calculates areas of occlusion, which can be used downstream by C_NewView and C_StereoColourMatcher to improve results between views.