Stereo Nodes
The Stereo Workflow nodes deal with stereo pairs of cameras in compositing, but within a VR environment.
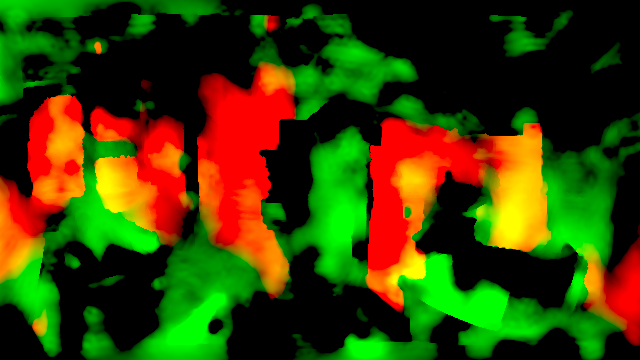
C_DisparityGenerator creates disparity maps and an occlusion mask for stereo images.
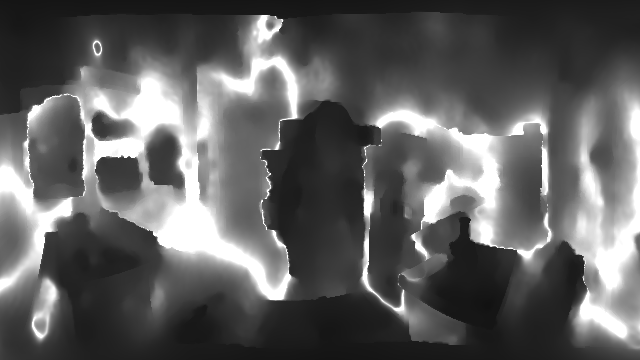
C_DisparityToDepth is a gizmo designed to convert disparity to a depth map for use in placing assets.
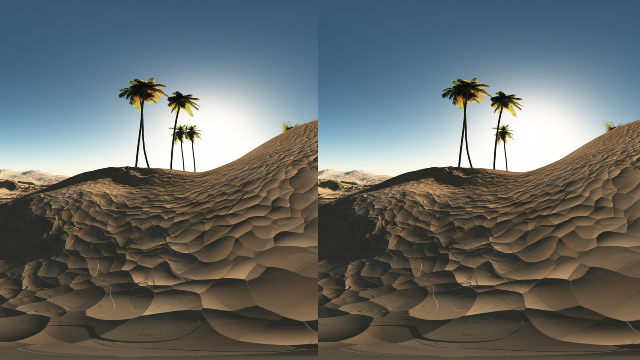
C_NewView can reconstruct a view using the pixels from another view, such as right view from left view.

C_StereoColourMatcher automates some of the color grading required between stereo camera pairs.