検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
フルボディIKの配置と回転
インバースキネマティクス、IKは、ゴールアイテムを配置および回転できるシステムです。IK階層チェーンはその目標に到達し、より高速で直感的なアニメーションワークフローを作成します。Modoセットアップと使用が簡単なフルボディIKオプションを提供します。を参照してください全身IK設定チェーンのセットアップについては、トピックを参照してください。
Solver
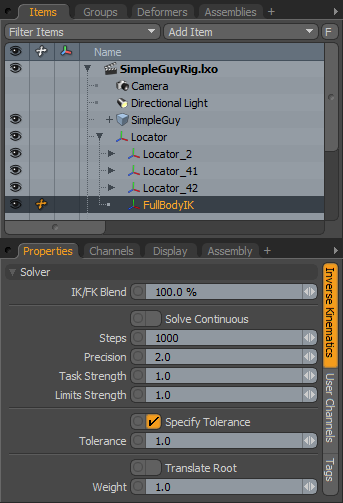
階層にIKチェーンを適用すると、 Modo IKソルバーアイテムを作成し、階層のルートにペアレント化します(デフォルトでは、 FullBodyIK)。これには、チェーン全体(ルートのすべての子アイテムを含む)のIKを制御する設定があります。
IK/FK Blend:チェーンがIKソルバーの影響を受ける度合いを制御します。これは、全自動IKソリューション間の減衰100での完全手動キーフレーム配置(FK)に対する% 0%。FKに向かってブレンドする前に、ドリブン状態のアイテムにキーフレームを設定する必要があります。それ以外の場合、アイテム 最後のキーフレーム位置に向かって補間します。
Solve Continuous:IKソルバがチェーンのレストポーズから開始するかどうかを指定します(Off)または以前のIKソリューションから( On )。違いは微妙ですが、後者は触手や尻尾のようなものに効果的です。
Steps:チェーン上のすべてのタスクを満足させ、最終的な解に到達しようとしているときにIKソルバーが評価する最大回数を示します。IKソルバーが満足のいく解決策を見つけた場合 最大ステップ数に達する前に、それは早期に停止します。
Precision:ソルバーの精度を制御します チェーン上のタスクを一致させようとします。値を大きくするとダンピングが減少しますが、計算が多くなり、チェーンの複雑さによってはパフォーマンスが低下する可能性があります。値を小さくするとダンピングが増加し、結果として解の精度が低下する可能性があります。
Task Strength:このチェーンに割り当てられたタスクの全体的な強さを指定し、タスクがIKソルバに与える影響を決定します。
Limits Strength:チェーンの制限の全体的な強さを制御します。関節が近づくとMinまたはMax回転角度が硬くなると、それ以上回転しにくくなります。この設定の値を小さくすると、回転のダンピングが柔らかくなります。値を大きくすると、ジョイントの回転が急激に減少します。非常に単純なチェーンの場合、制限が有効になる前にこの値を上げる必要があります。
Specify Tolerance:を使用Tolerance解決中の値(有効な場合)。無効にすると、 Modoチェーンとそのタスクのサイズと複雑さに基づいて、許容値を内部的に計算します。
Tolerance:ソルバーがソリューションを完了したと見なす前に、チェーンがタスクとどの程度一致する必要があるか(有効な場合)を決定します。値を小さくすると、ジョイントはタスクにさらに一致しますが、計算するためのステップが増えます。
Translate Root:(有効になっている場合)IKを解決するときにチェーンルートアイテムを移動できるかどうかを指定します。
Weight:有効にしたときにチェーンルートが自由に移動する方法を制御しますTranslate Root。ゼロ (0)移動を防ぎますが、 1.0自由に動くことができます。この設定を1より大きくすると、ルートがさらに移動する可能性が高くなります。
ジョイント設定
Joint—
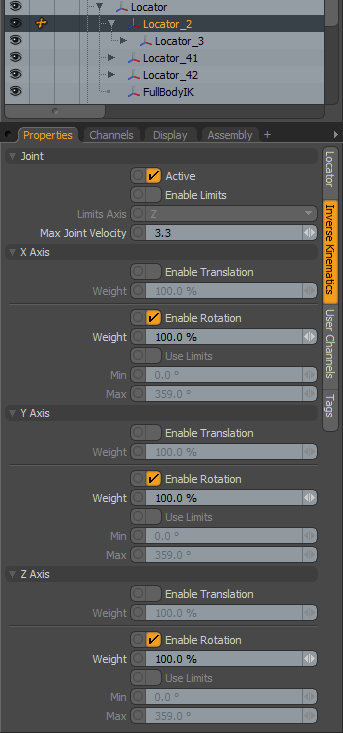
Active:ジョイントがIKソルバの影響を受けるかどうかを指定します(有効な場合)。このオプションを無効にすると、IKが無視されます。
Enable Limits:IKシステムのジョイントで制限をアクティブにするかどうかを指定します。ジョイントを制限して、各軸での回転を制限できます。
Limits Axis:設定された制限のジョイントの軸を指定します。ジョイントに制限を設定するときに使用します。通常、これは、ジョイントの最初の子ジョイントに向かって指している軸です。これは通常、IKセグメントに沿って走る軸です。
Max Joint Velocity:ジョイントがIKソルバーの反復ごとに行える回転の量を調整します。値が大きいほど、ジョイントはより多く回転できます。非常に単純なチェーン(2セグメントの腕や脚など)の場合は、回転を分散させるジョイントが少ないため、この設定を増やします。より複雑なチェーンでは、これを使用して、ゴールまたはタスクが手の届かないところに遠くに移動したときに発生する可能性があるジッタを低減します。
X/Y/Z Axis—
3つの軸はそれぞれ、並進と回転を有効または無効にし、移動量を制限するための同一のオプションを提供します。
Enable Translation:ジョイントの子がゴールに到達しようとしている間、ジョイントの子が現在のジョイントの指定された軸上を移動することを許可します(これはチェーンルートには適用されません)。
Weight:同時移動の量を制御します。 0%動きを無効にし、 100%完全な動きを可能にします。値を100%より大きくして、動きをより可能にすることができます。特に、いくつかの関節にTranslation有効。
Enable Rotations:指定した軸の回転を切り替えます。
Weight:指定した軸を中心とした回転の自由度を調整します。に0%関節は回転しません。で100%完全に回転できます。この値を100%より大きくすると、この軸が回転する可能性が高くなります。
Use Limits:(有効になっている場合)指定した値内でのみIKを強制的に回転させ、IKがMinまたはMax値。
Min/Max:ジョイントが内部で回転できる範囲を決定します。Modo有効にした場合にのみこれらの制限を使用します Use Limits。
タスクオプション
ジョイントに目標を追加すると、 Modo追加するTaskターゲットジョイントのオプションを使用して、ゴールに向かって到達するためにジョイントがどのように変化するかを調整します。タスクは、位置または回転(あるいはその両方)を保持するためのジョイントへの指示であるため、目標に関連しています。のためにPosition Task、IKソルバーは、チェーンアイテムを、タスクを追加したときにアイテムが持っていたワールド位置に維持しようとします。のためにRotation Task、IKソルバーは、タスクを追加したときと同じワールド方向にチェーンアイテムを維持しようとします。
Position Task—
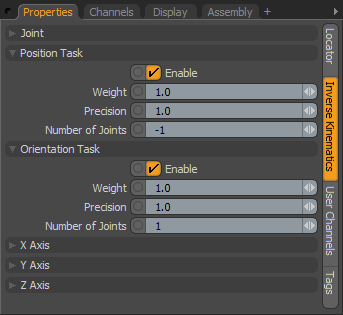
Enable:タスクが現在アクティブかどうかを制御します。
Weight:タスクの強さを指定して、タスクがチェーンに与える影響を決定します。チェーンに複数のタスクがある場合、これを使用して、特定のタスクがソリューションに多少の影響を与えるようにすることができます。
Precision:ソルバーがジョイントをそのタスクにどの程度近づけようとするかを制御します。
Number of Joints:このタスクが影響するルートに向かうジョイントの数を指定します。に設定-1すべての関節に影響を与えます。
Orientation Task—
Enable:タスクが現在アクティブかどうかを制御します。
Weight:タスクの強さを指定して、タスクがチェーンに与える影響を決定します。チェーンに複数のタスクがある場合、これを使用して、特定のタスクがソリューションに多少の影響を与えるようにすることができます。
Precision:ソルバーがジョイントをそのタスクにどの程度近づけようとするかを制御します。
Number of Joints:このタスクが影響するルートに向かうジョイントの数を指定します。に設定-1すべての関節に影響を与えます。
役に立たなかったのでごめんなさい
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がございましたら、下のボタンを使用してドキュメントチームにメールでお問い合わせください。
フィードバックをお寄せいただきありがとうございます。