検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
フルボディIKのセットアップ
アニメートするには2つの方法があります階層要素(たとえば、テーブル上のオブジェクトにキャラクターの腕が届くようにする):フォワードキネマティクス(FK)およびインバースキネマティクス(IK)。
FKでは、ルート要素を配置し、すべての要素をチェーンに沿って調整することで、アニメーションを設定します。まず、肩の関節、次に肘、最後に手首を配置します。手をオブジェクトに適切に配置するには、数回の試行で済みます。
IKは逆に機能し、はるかに直感的です。IKで、手を選択してオブジェクトに移動します。手首、肘、肩の関節が自動的に調整され、ゴール(この場合は手)への適切な向きが維持されます。
Modoかなり自動で非常に堅牢なIKシステムがあります。そのフルボディIKは、さまざまなリギング状況で機能する自動IKシステムです。通常は文字に使用されますが、ロケーターベースのアイテムの任意の階層チェーンに適用できます。ターゲット要素を選択してコマンドを適用することにより、チェーンを設定しますのツールボックスにありますSetupそしてAnimateのインターフェイスタブInverse Kinematicsサブタブ。
IKの割り当て
![]()
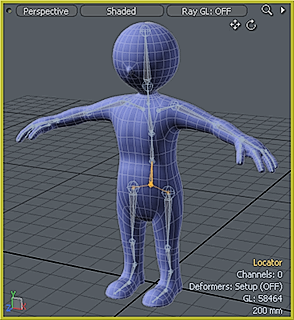
でIKを使用するにはModo、最初に、操作するアイテムにIKを割り当てる必要があります。あなたはこれをしますSetup各ジョイントのレスト位置を定義するモード。アイテムの階層またはフルにIKを適用できますスケルトン —バインディングプロセスの前または後。
階層全体にIKを割り当てるには、 ルートチェーンのアイテムをクリックして、 Assign IKボタン。Modoルートから外側に向かって、階層内のすべてのアイテムにIKを割り当てます。
|
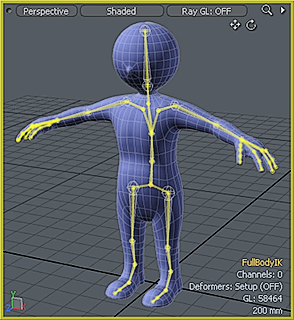
を選択Root階層の要素 |
Apply IKチェーン全体にIKを適用します |
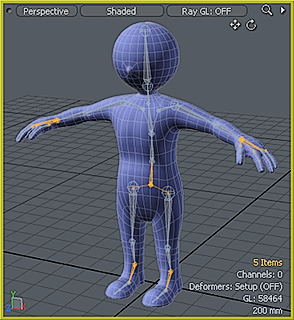
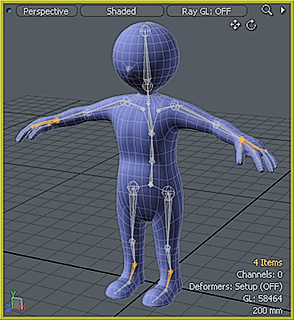
IKを階層の一部のみに割り当てるには、最初にルートアイテムを選択します。次に、IKが終了する追加のアイテムを選択します。最後に、 Assign IKボタン。
|
を選択RootそしてTerminating要素 |
Modo選択した要素間にIKを適用します |
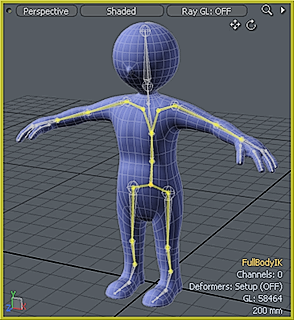
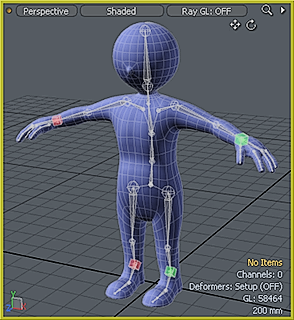
この方法でIKを割り当てた後、 Modo終了要素の選択を保持します。次に、をクリックして目標項目を追加できますAdd Goalボタン。今、あなたがゴールを変換すると、チェーンはゴールに向かって位置と回転を調整します。その後、終了できますSetupチェーンの配置を開始します。
|
終端要素は選択されたままです |
のAdd Goalボタンは、各終了要素に目標を追加します |
チェーン内のすべてのアイテムは同じ階層の一部である必要があり、すべてのアイテムは3Dロケータータイプのアイテム(スケルトンツールによって作成されたジョイント、ロケーター、メッシュアイテムなど)である必要があります。もしModo階層内の他のタイプのアイテムを検出するか、別のIKチェーンが存在する場合、IKプロセスその項目で終了します。スケーリングされたアイテムがある階層では、IKを割り当てる前に、そのスケールを固定する必要があります。IKを使って定義された、 Modo IKソルバーを作成し、ルートアイテムにペアレント化します(FullBodyIK)。このアイテムには、チェーンの全体的な動作を制御する設定があり、アイテムのProperties選択時のパネル。(詳細については、 全身IKトピック。)
ゴール
IKチェーンを定義しても、FK(フォワードキネマティクス)はターゲット要素を直接制御し、チェーン内の各アイテムを個別に変換できます。追加することによりGoalsそしてTasks、自動的にIKをアクティブにします。(目標は、IKチェーンを駆動するアイテムの一般的な用語です。ゴールアイテムを操作すると、IKチェーン内のアイテムの回転が変更され、最終アイテムの位置または回転がゴールアイテムの位置または回転と一致します。ゴールアイテムは、IKチェーンに属する任意のアイテムに追加できます(ただし、チェーンルート)、複数の目標を持つことができます。IKソルバーは、すべての目標を満たすための最適なソリューションを見つけようとします。
![]()
ゴールを追加するには、ゴールに向かって移動する必要のあるチェーンの一部を表すIKチェーンのアイテムを選択します(腕の手/手首のジョイントなど、FKで指を制御できるようにする)。次に、 Add Goal IKツールバーのボタン。Modo小さな立方体アイテムを(ロケーターシェイプとして)選択したチェーンアイテムの位置と方向に配置し、位置と方向を追加しますタスク選択したジョイントに接続し、それらをチャネルリンクで適切に接続します。立方体は、それを識別するのに役立つ初期のカスタム色を持っています。正の側は緑、負の側は赤です。
![]()
目標として使用する既存のアイテムがある場合は、 Assign Goalチェーンにアタッチするコマンド。ターゲットチェーンアイテムと、目標として使用するアイテムを(任意の順序で)選択します。のいずれかを選択しますAssign Goal右クリックしてコマンドAssign Goalボタン。これらのコマンドを使用すると、アイテムをPosition Goal、 Orientation Goal 、 または両方。
![]()
ゴールアイテムを削除し、ゴールが接続されているチェーンアイテムを選択して、 Tasks IKツールバーのボタンを使用する。
タスク
チェーンに割り当てられたIKは、次の場合にのみ有効になりますあなたが追加しますTasksチェーン内の1つ以上のアイテムに。タスクは、位置、回転、またはその両方を保持するための関節への指示であるため、目標に関連しています。のためにPosition Task IKソルバーは、チェーンアイテムを、タスクが追加されたときにアイテムが持っていたワールド位置に維持しようとします。のためにRotation Task、IKソルバーは、タスクが追加されたときと同じワールド方向にチェーンアイテムを維持しようとします。Modo実装するTasksジョイントに追加されたチャネルのグループとして。各タスクには、一連のFKチャネルとマトリックスチャネルがあります。これらのチャネルを使用して、(ワールド空間での)タスク変換を設定し、モディファイア、チャネルリンク、またはその他の手段を設定します。それらを駆動することができます。チェーン内の複数のアイテムにタスクを追加できます。その場合、IKソルバーはチェーン上のすべてのタスクを満たすための最適なソリューションを見つけようとします。チェーンアイテムの各タスクの設定は、アイテムのPropertiesパネル。
![]()
を割り当てるにはPosition Task、ターゲットジョイントを選択し、 Add Position Taskボタン。Modoのジョイントの属性に位置タスクオプションを追加します。 Propertiesジョイントを選択したときのパネル。
![]()
を割り当てるにはOrientation Task、ターゲットジョイントを選択し、 Add Orientation Taskボタン。Modoのジョイントの属性に追加の方向タスクオプションを追加しますPropertiesジョイントを選択したときのパネル。
チェーンに追加
チェーンの要素を追加または削除するには、 AddそしてRemoveボタン。
![]()
ジョイントまたはジョイントのチェーンを既存のチェーンに追加するには、新しい要素が同じ階層の一部である必要があります。要素を追加する1つの方法は、ターゲットチェーンのルートアイテムを選択してから、 Skeletonツール。次に、チェーン内の親要素を選択し、その要素から離れてクリックして実際のジョイントを描画できます。追加のジョイントは、それぞれが作成されるときに階層の下に追加されます。
2番目の方法は、ジョイント(またはジョイントのチェーン)をペアレント化オプションまたはドロップアクション (特に、 ParentそしてParent in Placeオプション)。アイテムをメイン階層の一部にしたら、要素または新しいチェーンのベースを選択して、 Add to Chainボタン。
![]()
ジョイントまたはジョイントのチェーンを削除するには、削除するベースエレメントを選択して、 Remove from Chainボタン。
チェーンの調整
![]()
膝や肘の関節の位置を変更するなど、チェーンの一部を調整する必要がある場合があります。このタイプの調整はSetupモード。にいるときSetupモードでは、ジョイントを調整してから、 Update Rest Poseボタンをクリックして、IKチェーンを更新します。タスクを推進している目標項目の場所や向きを、 マッチポジションまたは回転の一致のボタンSetupツールバーのタブ。タスクが目標によって駆動されない場合、チェーンはタスクチャネルの値と一致するように自身を更新します。設定によっては、これらを手動で編集する必要がある場合があります。
IKの削除
![]()
を選択して、階層からIKを削除できます。 FullBodyIKアイテムをクリックしてRemove IKインバースキネマティクスツールボックスのボタン。Modo各アイテムからIK設定を削除し、 FullBodyIKシーンのソルバーアイテム。
平面IK
Planar IKソルバーは、2つまたは3つのロケータージョイントを処理できます。デュアルIKソルバーと同様に、ゴールロケーターを配置することにより、ジョイントは、できる限り最適な位置に配置されます。
役に立たなかったのでごめんなさい
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がございましたら、下のボタンを使用してドキュメントチームにメールでお問い合わせください。
フィードバックをお寄せいただきありがとうございます。