検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
3D測量ポイントの割り当て
ユーザートラックを作成する場合、既知の3D測量ポイントとして割り当てることができます。これにより、CameraTrackerに2Dフッテージのどのポイントが3Dモデルの対応するポイントに対応するかがわかり、カメラを解決して既知の3Dポイントに一致させ、最良の結果を得ることができます。
注意: ProjectionSolverワークフローは3D測量ポイントに置き換えられましたが、を押してProjectionSolverノードを追加できますXノードグラフでProjectionSolver Tclコマンドとして。
ヒント: ModelBuilderまたは外部アプリケーションを使用して、フッテージの3Dモデルを作成できます。
シーンに3D測量ポイントを作成するには:
| 1. | シーンと調査ポイント間の完全な回転、変換、およびスケールを定義するには、少なくとも3つのユーザートラックを作成して追跡します。3つ以上を追跡すると、最適な結果が得られます。見るユーザートラックの操作詳細については。 |
| 2. | を押して、ビューアを3Dモードに切り替えますTabビューアで、またはView selection落ちる。 |
| 3. | をセットするThumbnailビューアーの上をコントロールしてAllすべての参照フレームのサムネイルをビューアでオーバーレイとして表示します。 |
| 4. | ビューアの上にある選択モードボタンを使用して、 Vertex selectionモード。 |
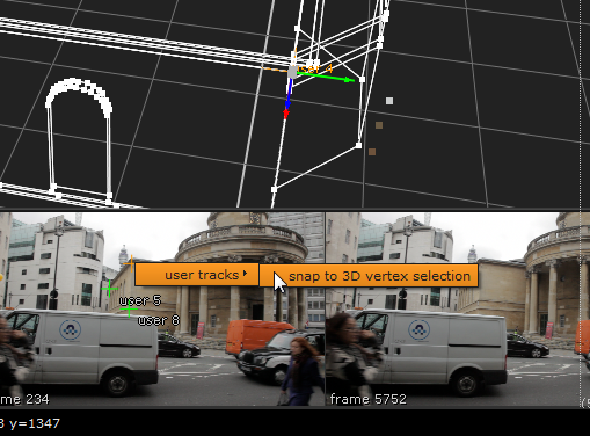
| 5. | 3Dモデルの頂点と、サムネイルギャラリーで調査ポイントにするユーザートラックを選択します。 |
| 6. | ユーザートラックを右クリックして選択しますuser tracks > snap to 3D vertex selection。 |
| 7. | CameraTrackerプロパティパネルで、 UserTracksトラックのリストを表示するタブ。 |
ユーザートラックテーブルには、3D頂点をユーザートラックに一致させるときにピクセルエラーが表示されます。これを使用して、カメラが3D測量ポイントにどの程度適合しているかを確認できます。
ソルバーがポイントと一致しなかった場合、エラー値が高くなります。このような場合は、2Dフィーチャの位置を見て、それらが同じポイントに対応していることを確認し、モデル上の3D頂点をダブルチェックしてみてください。
| 8. | シーン内の必要なユーザートラックに対してプロセスを繰り返し、有効にしますsユーザートラックテーブルの各トラックのチェックボックス。 |
のs解析中にポイントを既知の3D測量位置として指定し、CameraTrackerがジオメトリに対して正しく配置されたカメラを作成できるようにします。
ヒント: 同じシーンまたはコンテンツの複数のフッテージソースがある場合は、調査ポイントを使用して各ソースを解決し、それらをすべて同じ世界に登録することもできます。見るソルバの組み合わせ。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。