検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
カメラリグの準備
リグを作成する最初のステップは、標準を使用してカメラ映像を読み込むことですNukeノードを読み取り、C_CameraSolverノードに接続します。フッテージは、ファイルごとに1つまたは複数のビューを持つ静止画またはシーケンスです。
警告: CaraVRとNuke自動同期をサポートしていません。
| 1. | に移動しますProject Settingsそして設定full size format次のような、必要なlatlong形式への制御2K_LatLong 2048x1024。 |
注意: C_CameraSolver、C_ColourMatcher、およびC_Stitcherを使用して、形式を個別に設定できます。 Propertiesパネル。
| 2. | 読み込みノードを使用して、すべての映像を読み込みます。マルチビュー映像を使用している場合、 Nuke続行する前に関連するビューを作成するように求められます。 |
| 3. | すべての読み取りノードを選択し、C_CameraSolverノードをノードグラフに追加して、ビューアーを接続します。 |
| 4. | フッテージにファイルごとに複数のビューが含まれる場合は、有効にしますStereoにCamerasタブを使用して、解決したいビューを選択しますInput Views落ちる。 |
| 5. | ノードのプロパティC_CameraSolverタブで、 Presetプルダウンから必要なプリセットリグ情報を選択してロードします: |
• Custom -リグに任意の数のカメラを指定できます。 Camerasタブ。
• PTGui -PTGuiで作成された既存のリグを指定できます。見るリグのインポート詳細については。
注意: CaraVRはPTGuiバージョン10のみをサポートします.ptsファイル、またはそれ以前。PTGuiの新しいバージョンを使用している場合は、必ず使用してくださいPTGui 10 Projectエクスポートオプション。
• Preset Rigs -リストから必要なプリセットリグを選択して、適切な数のカメラで関連するリグを作成します。これらは「正常に機能する」ほど正確ではないこともめったにありませんが、場合によっては解決の良い基盤となります。
Nokia OZO、Google Jump、またはAutopanoリグを使用している場合は、インポートする必要もあります。 .txt、 .json 、または.panoファイル。から必要なリグを選択しますPresetドロップダウンをクリックしてSetup Rig必要なファイルを参照します。見るリグのインポート詳細については。
注意: インポートまたはプリセットされたリグを使用している場合、入力カメラがリグが設定されたのと同じ順序で接続されていることを確認してください。C_CameraSolverによって生成されたプレビューステッチがビュー間の即時の不一致を示している場合、カメラの順序が正しいことを確認します。
ヒント: 別のリグに変更する場合は、リグを選択しますPresetドロップダウンをクリックしてSetup Rig。
| 6. | プリセットまたはインポートされたリグを使用する場合、CaraVRはリグ内のカメラに関する情報に基づいた推測を行います。を使用している場合Customリグ、有効化Set global camera parametersレンズのパラメーターを入力します。ここに入力する情報が正確であればあるほど、ソルバーから良い結果が得られる可能性が高くなります。 |
注意: 設定しているときCustomリグでは、リグ内のすべてのカメラ設定は同一であると想定され、 Camerasタブ。リグに異なるカメラが含まれている場合は、 Camerasタブをクリックし、テーブルからカメラを選択してカメラのレンズパラメーターを変更します。
| 7. | に進むカメラのマッチングと解決。 |
リグのインポート
CaraVRを使用すると、PTGui、Nokia OZO、Google Jump、Autopanoからリグをインポートできます。 .pts、 .txt 、 .json 、そして.panoファイル形式。
注意: インポートされたリグを使用している場合、入力カメラがリグが設定されたのと同じ順序で接続されていることを確認してください。C_CameraSolverによって生成されたプレビューステッチがビュー間の即時の不一致を示している場合、カメラの順序が正しいことを確認します。
リグをインポートするには:
| 1. | 読み込みノードを使用して、すべての映像を読み込みます。マルチビュー映像を使用している場合、 Nuke続行する前に関連するビューを作成するように求められます。 |
| 2. | すべての読み取りノードを選択し、C_CameraSolverノードをノードグラフに追加します。 |
| 3. | ノードのプロパティで、をクリックしますPresetドロップダウンから選択PTGui、 Nokia OZO 、 Google Jump 、またはAutopanoそしてクリック Setup Rig。 |
注意: CaraVRはPTGuiバージョン10のみをサポートします.ptsファイル、またはそれ以前。PTGuiの新しいバージョンを使用している場合は、必ず使用してくださいPTGui 10 Projectエクスポートオプション。
ファイルブラウザが表示されます。
| 4. | 必要なテンプレートファイルに移動し、クリックしますOpenリグをインポートします。 |
カメラとレンズのパラメーターは、ファイル内のメタデータから自動的に入力されます。
| 5. | に進むカメラのマッチングと解決。 |
Autopanoインポートに関する注意
現在の制限.panoインポートは次のとおりです。
• Autopanoの機能の一致は、CaraVRの一致に変換されません。
• 魚眼レンズを使用したリグのみをインポートできます。
• Autopanoの魚眼モデルは、CaraVRで実装されているものとは異なります。他のアプリケーションのインポート手順と同様に、値は変換されるため、歪みは正確には一致しません。
バックツーバックリグのインポート
のBack to Backプリセットは、180°を超える視野を持つ2台のカメラの魚眼レンズリグを解決するように設計されています。プリセットを使用するには:
| 1. | 選択するBack to BackからPreset落ちる。 |
| 2. | クリックSetup Rig。 |
リグ設定ダイアログが表示されます。
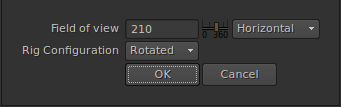
| 3. | 入力しますField of viewそして選択Horizontal、 Vertical 、またはDiagonalリグに応じて。 |
ヒント: わからない場合Field of view、C_CameraSolverのグローバルを推定し、調整しますfocal lengthそれに応じてクリックした後OK。
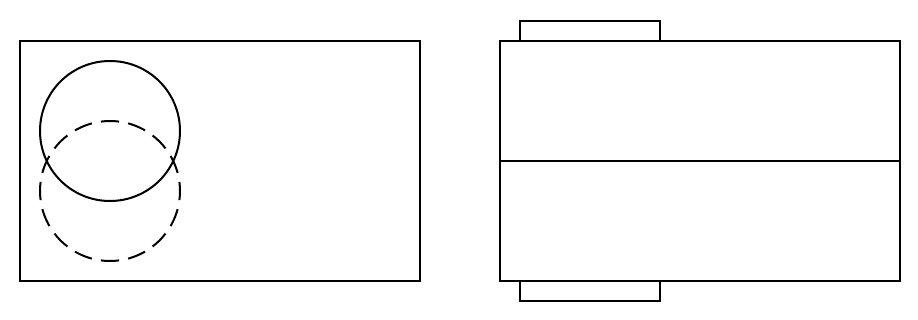
| 4. | をセットするRig Configurationさまざまなレンズ位置を考慮するため: |
• Rotated -レンズは垂直ではなく、水平ではありません。
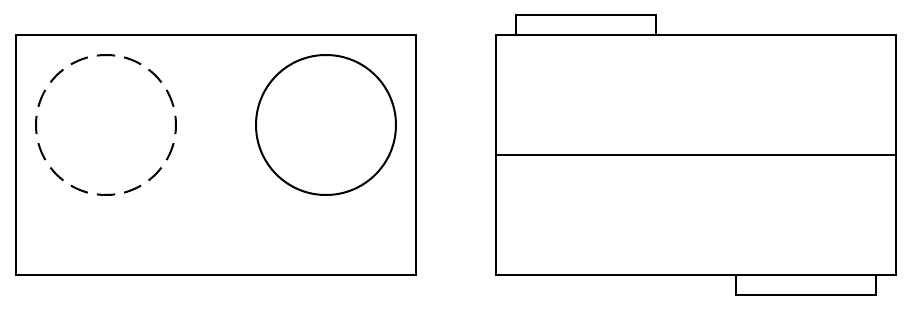
• Flipped -レンズは水平ではなく、垂直ではありません。
| 5. | クリックOK。 |
| 6. | に進むカメラのマッチングと解決。 |
注意: 2台のカメラ、背中合わせのリグは、カメラ間のオーバーラップがないため、C_Stitcherに問題を引き起こす可能性があります。見るバックツーバックリグのオーバーラップの改善詳細については。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。