検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
カメラのマッチングと解決
リグを設定した後の次のステップは、リグのカメラプロパティを設定し、オーバーラップするカメラ間の一致を特定し、カメラの相対位置を解決することです。
| 1. | のAnalysisセクションでは、リグのカメラプロパティを変更できます。デフォルトでは、CaraVRはすべてのカメラの焦点距離が同じで、レンズの歪みがなく、球形のレイアウトであると想定しています。 |
をセットするFocal Length を説明します:
• Known Focal Length -ソルバの既存の焦点距離を修正します。
• Optimize per Camera -リグ内の各カメラの焦点距離を計算します。
• Optimize Single -リグ内のすべてのカメラに対して単一の最適化された焦点距離を計算します。
| 2. | をセットするLens Distortion、 もし必要なら。CaraVRはNo Lens DistortionデフォルトではあるがFocal Length、次のことを説明できます。 |
• Known Distortion -ソルバのレンズの歪みを修正します。
• Optimize per Camera -リグ内の各カメラのレンズ歪みを計算します。
• Optimize Single -リグ内のすべてのカメラに対して単一の最適化されたレンズ歪みを計算します。
| 3. | をセットする Camera Layout使用する予定: |
• Nodal Layout -すべてのカメラはシーンの原点にあります。たとえば、360枚の静止画を撮影する単一のDSLRは、このノードレイアウト設定を使用します。
• Spherical Layout -リグ内のカメラは、直径によって定義される球に配置されます。 Rig Size上の制御Camerasタブ、デフォルトは30 cm。
• Horizontal / Vertical / Planar Layout -リグ内のカメラは、選択に応じて単一の線または平面に配置されます。
• Free Layout -カメラの位置に制約はありません。
注意: のHorizontal、 Vertical 、 Planar 、そしてFreeレイアウトは実験的です。お問い合わせくださいsupport.foundry.comフィードバックがある場合は、Foundryと共有してください。
ヒント: 設定するRig Size使用中のリグの実際のサイズを制御することで、他のリグの実際の測定値を入力できますCamerasなどのコントロールFocal Length。
同時に撮影する複数のカメラを使用するリグは、通常、球状の構成になっており、 Convergenceカメラ間で、シーンのさまざまな深さでの画像の配置を確認します。見る球状リグの収束の調整詳細については。
| 4. | CaraVRは、シーケンスの先頭に単一のキーフレームを自動的に追加して、シーン内の固定ポイントに対応する一連の機能一致を定義しますが、次の方法でキーフレームを手動で追加できます。 |
• ビューアでスクラブしてからクリックするAdd Key (![]() )現在のフレームにキーフレームを追加する、または
)現在のフレームにキーフレームを追加する、または
• クリックKey Allシーケンス全体にキーフレームを追加するにはStep間隔。
• クリックImportキーフレームをインポートするノードを選択します。スクリプト内のC_CameraSolver、C_Stitcher、またはC_ColourMatcherのインスタンスからキーフレームをインポートできます。
キーフレームを追加するほど、プロセスに時間がかかりますが、より良い結果が得られる場合があります。
注意: C_Stitcherは、指定されたキーフレームでオプティカルフローカメラワープのみを計算し、同じキーフレームに該当しないアップストリームアニメーションを無視します。使用Import C_CameraSolverからすべてのキーフレームをコピーするボタン。このようにして、カメラごとの追加の手動キーフレームがCamerasタブもコピーされます。
ヒント: ノードレイアウトのリグを解く場合は、 Settingsタブと有効化Solve for animated cameras各分析キーフレームでカメラパラメーターのアニメーション値を計算します。
この設定は、異なるシーン深度を補正するようにカメラを自動的に調整することにより、モノ360節点ステッチのゴーストを除去するのに役立ちます。
ただし、カメラの位置が固定されている場合、この設定では奇妙な結果が生じる可能性があることに注意してください。分析キーでカメラの回転を変更すると、背景シーンがシフトする場合があります。
| 5. | クリックMatch 共有機能の重複するカメラのキーフレームを比較します。CaraVRは、デフォルトでオーバーラップするカメラの一致のみを検索します。 |
注意: Matchリグ内のすべてのカメラの特徴の一致を同時に計算するため、ステレオ設定の左右の画像について個別に計算する必要はありません。見るステレオグラフィックリグのステッチ詳細については。
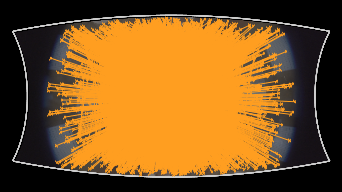
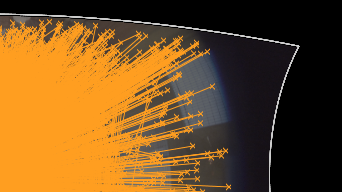
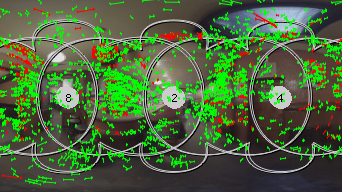
最初に、カメラで一致したすべての機能がビューアーで互いにオーバーレイします。個々の一致は、リグ上のカメラを解決するか、2番目の画像に示すようにビューアーにズームインするまで表示されません。
|
|
|
|
さまざまなビューアズームレベルですべてのカメラに一致する機能。 |
|
注意: 一致は、再生ヘッドがキーフレーム上にある場合にのみ表示されます。
ビューアーの上にある表示ボタンを使用して、リグ上のカメラをステップスルーして一致を調べることができます。ビューアーを切り替えてアルファチャンネルのみを表示する場合は、各ビューに適用されているデフォルトマスクを調べることもできます。
|
|
|
|
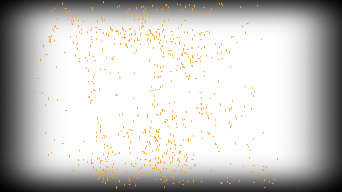
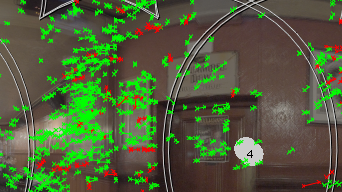
1台のカメラで機能が一致します。 |
デフォルトのアルファチャネルマスク。 |

リグが解決されると、ラテロン空間でオーバーラップするカメラ間の一致を表示することもできます。 Cam ProjectionへのドロップダウンLatlong。
|
|
|
単一のカメラでの機能の一致 |
見る一致と解決のトラブルシューティング試合結果の改善に関する詳細については。
| 6. | クリックSolve選択したリグのジオメトリを計算して、リグ内の他のカメラに対する各カメラの位置と方向を定義し、一致した画像を正しい順序で配置します。 |
注意: ソルバは、リグ内のすべてのカメラのジオメトリを同時に計算するため、ステレオ設定の左右の画像に対して別々に計算する必要はありません。見るステレオグラフィックリグのステッチ詳細については。
解決されたプレビュー画像がビューアに表示され、リグ内のカメラに一致するすべてのポイントが含まれます。
|
|
|
|
解決されたカメラと機能は、異なるビューアズームレベルで一致します。 |
|
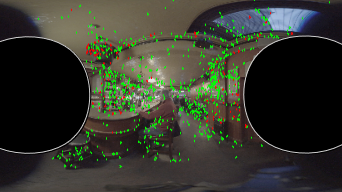
| 7. | 切り替えるCameraモード( |
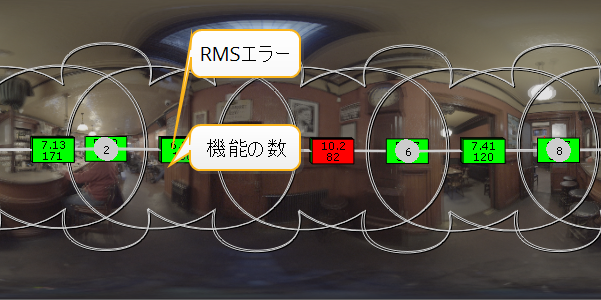
緑のオーバーレイは、以下のRMSエラーを表しますError Threshold赤はしきい値を超えるものをオーバーレイします。
注意: オーバーレイは、再生ヘッドがキーフレーム上にある場合にのみ表示されます。
見る一致と解決のトラブルシューティング一致した機能を改良して解決する方法についての情報。
| 8. | を押してオーバーレイをオフにしますQビューアー上で結果を確認します。 |
| 9. | 解決されたカメラは、ビューをつなぎ合わせる前に水平線を正確にするために少し作業が必要な場合があります。CaraVRは画像を正しい向きに自動的に配置しない場合があります。 |
CaraVRは、地平線を合わせるための2つの方法を提供します。 Transform上のコントロールSettingsタブとビューアツールバー。
• Transform Controls -C_CameraSolverを開きますPropertiesパネルをクリックしてSettingsタブ。調整するrotate x、y、そしてzカメラをフレームの半分の平らな線、または赤道として整列させるコントロール。
• Viewer toolbar -有効にしますHorizonツールとホールドCtrl/Cmd+Altビューアでドラッグして水平線を調整します。
|
|
|

注意: この方法で個々のカメラを調整することもできます。 Camera代わりにツール。
| 10. | を使用して必要な出力解像度を設定しますFormat必要に応じてドロップダウン。 |
ヒント: CaraVRは、タブを追加しますPropertiesのパネルNukeの書き込みノードを使用すると、次のようなビューのグループをすばやく選択できますstereoそしてcamsプレビューまたはステッチをレンダリングするとき。引き続きビューを手動で選択できますviewsドロップダウン、しかしView Presetsプロセスを高速化できます。
| 11. | 不正確な機能の一致または解決されたカメラの詳細については、 一致と解決のトラブルシューティング画像をステッチする前のセクション。 |
解決されたリグを取得したら、さまざまなプリセットノードにエクスポートできます( プリセットノードへのエクスポート詳細については、スキップしてください画像をつなぎ合わせるプレビューをつなぎ合わせるか、 C_ColourMatcherステッチの前にC_ColourMatcherを使用します。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。