検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
一致と解決のトラブルシューティング
一部のシーケンスは、マッチングおよび解決中に問題を引き起こすことが避けられません。リグを解決する際にCaraVRを支援するための洗練されたワークフローがいくつかあります。
ヒント: CaraVRは、タブを追加しますPropertiesのパネルNukeの書き込みノードを使用すると、次のようなビューのグループをすばやく選択できますstereoそしてcamsプレビューまたはステッチをレンダリングするとき。引き続きビューを手動で選択できますviewsドロップダウン、しかしView Presetsプロセスを高速化できます。
マッチの拒否と改良
カメラを照合して解決した後、指定した範囲外の機能がいくつか表示されますError Threshold赤でマークされた許容値。
一般的に、一致したペアは、シーケンスの特定の領域で同じ方向にトレンドする必要があるため、一致の調整を開始するのに適した場所です。一致が悪いというもう1つの良い兆候は、同じ地域の他のペアと比較した場合の一致したフィーチャ間の距離です。
| 1. | 切り替えるCameraモード( |
注意: このオーバーレイは、キーフレームが存在するフレームにのみ表示されます。
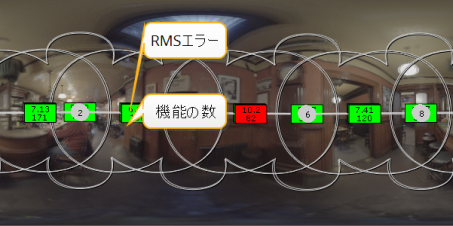
この例では、カメラ4と6のオーバーラップ内の一致により、10.2のRMSエラーが登録されますが、これは非常に高い値です。
| 2. | 最初に試すことは、 Analysisノードプロパティのセクション。 |
| 3. | クリックLens Distortionそして選択Optimise Singleリグ内のすべてのカメラに1つのレンズモデルを使用します。 |
| 4. | クリックRefine。RMSエラーがより許容可能なレベルまで下がることがあります。 |
注意: 次のように設定することで、さらに解決を洗練させることができますLens DistortionにOptimse per CameraそしてクリックRefine再び特定のリグに対して。
| 5. | に戻るMatchesモード( |
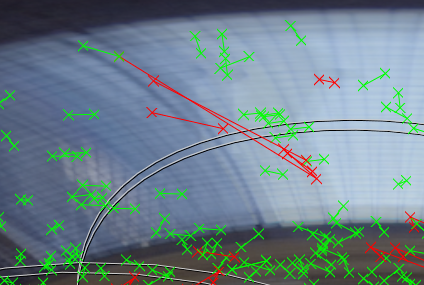
この例は、CaraVRが自動的に拒否した一致を示しています。エリア内の他のマッチと比較すると、それらはかなり離れていますが、下に下げると他のマッチも赤くなりますError Thresholdコントロール。
| 6. | 拒否された一致を削除するには、次のいずれかを実行できます。 |
• クリックReject C_CameraSolverプロパティのボタン、または
• 個々の一致を選択して押しますBackspaceまたはDeleteキーボードで。
| 7. | 拒否された一致をクリーンアップした後、クリックしますRefine C_CameraSolverプロパティで、現在の解析に基づいて解析を再計算します。 |
機能の数とともにRMSエラーが減少するはずです。
ユーザー一致の追加
ユーザーの一致は、C_CameraSolverによって自動的に検出されるのではなく、手動で配置され、自動一致を改善するために使用できます。必要な数のユーザー一致を追加できます。
| 1. | 切り替えるAdd Matchモード( |
| 2. | ホールドCtrl/Cmd+Altビューアーで複数のカメラに存在する機能をクリックして、一致マーカー( |
| 3. | ユーザーマッチをクリックして、機能が存在する各カメラのズームウィンドウを表示します。 |
ヒント: ビューアをパンして自動機能を移動すると、ズームウィンドウが見やすくなります。
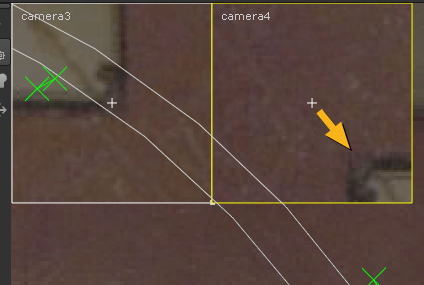
| 4. | 一致の各インスタンスのカメラズームウィンドウをクリックしてドラッグすることにより、一致位置を調整します。 |
各カメラに一致マーカーが追加されます。

| 5. | 必要な数のユーザー一致を追加し、クリックしますRefine C_CameraSolverプロパティで、現在の解析に基づいて解析を再計算します。ユーザーマッチは、リグを解決するときに自動マッチよりも重要性が高いため、追加するマッチの精度が高いほど、優れたソルブを取得できる可能性が高くなります。 |
ヒント: 調整できますSettings > User Matches Weightソルバーを改良する際に、ユーザーマッチに多かれ少なかれ「重み」を与えるようCaraVRに指示するコントロール。多くのユーザー一致を追加していない場合は、自動生成された一致により多くの解決が依存するように、重みの量を減らすことを検討してください。
| 6. | に戻るCameraモード( |
球状リグの収束の調整
球面カメラレイアウトを使用している場合は、調整できますConvergeカメラがオーバーラップする深度を変更するコントロールを使用して、シーン内の特定の領域に焦点を合わせることができます。収束を使用して、必要な深度でゴーストが消えるまでスライダーを調整することにより、カメラからオブジェクトまでの距離を決定できます。
C_CameraSolverの収束は、ソルバの品質をテストするために使用され、最終的な収束はC_Stitcherのコントロールを使用して設定されます。見る球状リグでの収束点の設定詳細については。
注意: すべてのカメラが同じ原点を共有するため、収束はノードリグに影響を与えません。
最初のステップは、カメラが置かれる球のおおよその直径を設定することですRig Size上の制御Camerasタブ。これにより、ソルブの品質に応じて、リグの3D表現が実際の単位に近くなります。のConverge次に、コントロールはプレビューステッチが収束する深さを定義し、ショットのさまざまな領域に焦点を合わせます。
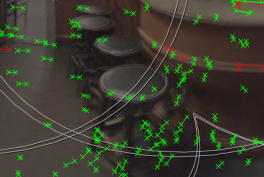
この例は、デフォルトを使用した収束深度を示していますRig Sizeの設定0.3 (または30 cm)。のConverge制御のデフォルトは10、これは前景のスツールを考慮すると少し高くなります。
|
|
|
|
重複するカメラ間のオフセットを示すデフォルトのリグ設定。 |
|
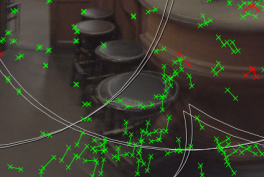

を減らすConverge周りの価値1.6メーターはスツールをより鮮明に焦点を合わせます。一致したフィーチャペアが互いに重なり合っていることもわかります。
|
|
|
|
収束深度を小さくすると、オフセットがうまく調整されます。 |
|

赤で表示されている機能の一致を削除するには、クリックしますRejectノードのプロパティで、 Refine解決します。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。