検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
結果の改善
結果を絞り込むには:
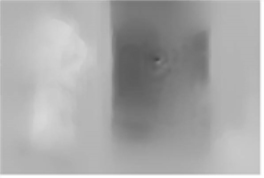
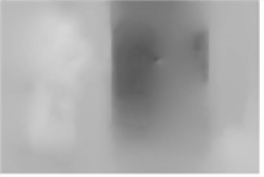
| 1. | 調整するDepthDetail深度マップの計算に使用される画像の解像度を変更します。デフォルト値の0.5は、画像解像度の半分に等しくなります。値を小さくすると処理が高速化され、結果がより滑らかになります。値が大きいほど詳細が細かくなりますが、処理時間が長くなります。 |
|
|
|
| Depth Detail = 0.15 | Depth Detail = 0.85 |

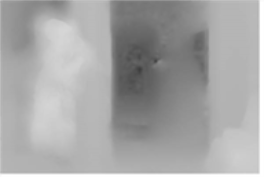
| 2. | デプスマップが平坦な画像領域でノイズが多い場合は、 Noiseの値Depth Generationパラメータグループ。これは、Depth Mapを計算するときにDepthGeneratorが入力フッテージで無視するノイズの量を設定します。値が大きいほど、深度マップが滑らかになります。 |
|
|
|
| Noise = 0 | Noise = 0.15 |

| 3. | デプスマップをさらに滑らかにする必要がある場合は、増やすこともできますSmoothness。これは深度計算に影響を与えるのではなく、結果にインテリジェントなぼかしを適用します。 |
平滑度が高いと、多くの局所的な詳細が失われる可能性がありますが、ノイズの多い深度値が生成される可能性は低くなります。結果のデプスマップがギザギザになっている場合でも、平滑度が低いとディテールマッチングに集中します。
| 4. | のStrengthパラメータは、フレーム間のピクセルマッチングの強度を定義します。通常はデフォルト値のままにしておくことができます。ただし、深度マップが画像の一部のエッジに収まらない場合は、増やすことができますStrength細かいディテールが失われた場合に強制的に一致させます。減らすこともできますStrength深度マップをスムーズにしますが、一般的には、比較的高い値のままにして、アルゴリズムが画像と一致し、深度を正しく計算していることを確認することをお勧めします。 |
|
|
|
| Strength = 0.5 | Strength = 1.5 |
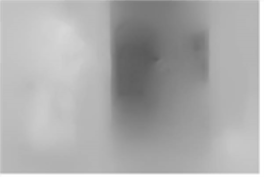
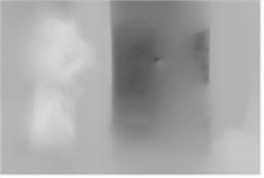
| 5. | デプスマップのオブジェクトの境界に満足できない場合は、調整しますSharpness。オブジェクト間に明確な境界を作成するには高い値を使用し、境界を滑らかにするには低い値を使用します。 |
|
|
|
| Sharpness = 0.05 | Sharpness = 0.95 |

| 6. | 必要に応じて、 Near Clip PlaneそしてFar Clip Plane深度マップで許可される最小値と最大値を設定します。この範囲外のすべての深度値は、これらの値にクリップされます。 |
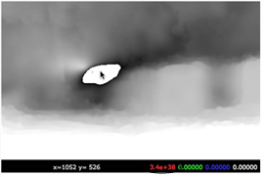
| 7. | 深さの計算があいまいな領域があるかどうかを確認するには、 Mark Bad Regions。 |
あいまいな領域は、深度マップで非常に大きな値としてマークされます。このような領域は、CameraTrackerがカメラデータを使用してすべてのピクセルの深度を計算できなかった場合に発生することがあります。たとえば、特定のカメラの動きが原因です。
|
|
| Mark Bad Regions 有効。 |
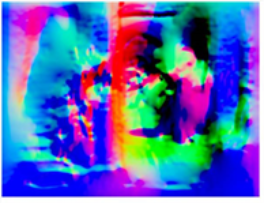
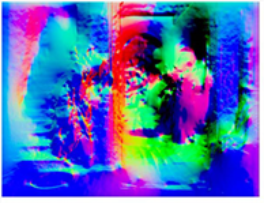
| 8. | 深度マップに満足できるようにパラメータを設定したら、法線パスを表示します(以前に生成することに決めた場合)。法線は深度から計算され、法線方向はピクセル間の深度の変化によって定義されます。法線パスは、深さの小さな変化が法線の大きな変化につながるため、ノイズが多い場合があります。低解像度の深度マップを使用して法線を計算して法線マップを滑らかにするには、 Normal Detail。これにより、より広い範囲のピクセルにわたる深度の変化が統合され、法線パスのノイズが減少します。 |
デフォルト値の0.25では、法線パスは1/4の解像度で計算されます。
|
|
|
| Normal Detail = 0.2 | Normal Detail = 0.8 |
| 9. | に進む結果を使用する。 |
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。