検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
点群のフィルタリング
含まれるポイントの数と品質を調整することにより、ポイントクラウドをフィルタリングできます。NukeX再計算せずに追跡されたポイントクラウドを直接フィルタリングし、ワークフローを合理化します。
| 1. | 確認しておいてDisplay rejected pointsが有効になり、3Dビューアを動的に更新するためにしきい値コントロールを調整します。拒否されたトラックは赤で強調表示されます。 |
| 2. | 調整するAngleThreshold最小許容角度を設定して、3Dポイントを三角化します(度単位)。三角形分割角度が大きいポイントは、より正確になる傾向があります。 |
のしきい値を設定します0すべてのポイントを三角測量するか、しきい値を上げて最も正確でないポイントを強調表示します。
ヒント: 経験則として、5度未満の場合は正しくない可能性があります。
| 3. | 調整するDensityThreshold最小許容点密度を設定します。孤立したポイントは、それほど正確ではない傾向があります。 |
のしきい値を設定します0すべてのポイントを出力するか、しきい値を大きくして、最も孤立した精度の低いポイントを強調表示します。
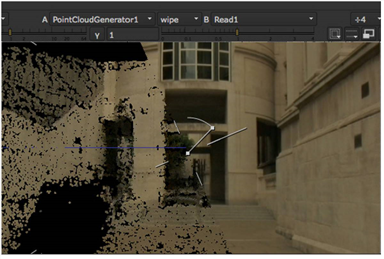
| 4. | 見る人wipeこのツールは、2Dソース映像をポイントクラウドと比較することで、孤立したポイントを見つけるのに役立ちます。 |
ソースイメージの入力AをPointCloudGeneratorノードに、入力Bを読み取りノードに設定します。
見るビューアーコントロールの使用詳細については。
| 5. | に進む拒否されたポイントの削除。 |
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。