전신 IK 위치 및 회전
IK (Inverse Kinematics)는 목표 항목을 배치하고 회전 할 수있는 시스템입니다. IK 계층 구조 체인은보다 빠르고 직관적 인 애니메이션 워크 플로우를 만들기 위해 이러한 목표를 달성합니다. Modo 설정 및 사용이 쉬운 Full Body IK 옵션을 제공합니다. 참조 전신 IK 설정 체인 설정에 대한 정보는 주제를 참조하십시오.
Solver
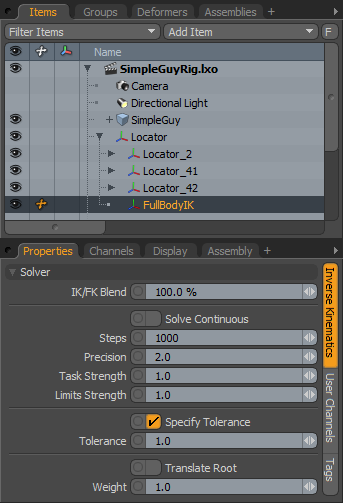
IK 체인을 계층 구조에 적용하면 Modo IK 솔버 항목을 생성하고이를 계층의 루트에 부모로 지정합니다 (기본적으로 FullBodyIK). 여기에는 전체 체인 (루트의 모든 하위 항목 포함)에 대한 IK를 제어하는 설정이 있습니다.
IK/FK Blend: 체인이 IK 솔버의 영향을받는 정도를 제어합니다. 이것은 완전 자동 IK 솔루션 사이에서 100완전 수동 키 프레임 포지셔닝 (FK)에 대한 % 0%. FK를 향해 블렌딩하기 전에 아이템을 구동 상태로 키 프레임해야합니다. 그렇지 않으면 항목 마지막 키 프레임 위치를 향해 보간합니다.
Solve Continuous: IK 해석이 체인의 휴식 자세에서 시작되는지 여부를 지정합니다 (Off) 또는 이전 IK 솔루션 ( On ). 차이점은 미묘하지만 후자는 꼬리 나 촉수 같은 것들에 효과적입니다.
Steps: 체인의 모든 작업을 충족시키고 최종 솔루션에 도달하는 동안 IK 솔버가 평가하는 최대 횟수를 나타냅니다. IK 솔버가 만족스러운 솔루션을 찾으면 최대 단계 수에 도달하기 전에 일찍 중지됩니다.
Precision: 솔버의 정확도를 제어합니다 체인의 작업을 일치 시키려고합니다. 값이 클수록 댐핑은 감소하지만 더 많은 계산이 필요하며 체인의 복잡성에 따라 성능이 저하 될 수 있습니다. 값이 작을수록 댐핑이 증가하고 정확도가 떨어집니다.
Task Strength:이 체인에 할당 된 작업의 전체 강도를 지정하고 작업이 IK 해결에 미치는 영향을 결정합니다.
Limits Strength: 체인 제한의 전체 강도를 제어합니다. 관절이 접근 할 때 Min 또는 Max 회전 각도가 더 강해지고 더 회전 할 가능성이 줄어 듭니다. 이 설정 값이 낮을수록 회전 감쇠가 더 약해집니다. 값이 클수록 관절의 회전이 갑자기 줄어 듭니다. 매우 간단한 체인의 경우 한계가 적용되기 전에이 값을 높여야합니다.
Specify Tolerance: 사용 Tolerance 해결하는 동안 값 (활성화 된 경우). 비활성화하면 Modo 체인의 크기와 복잡성 및 작업을 기반으로 내부적으로 공차를 계산합니다.
Tolerance: 솔버가 솔루션을 완료 한 것으로 간주하기 전에 체인이 작업과 얼마나 근접해야 하는지를 결정합니다 (활성화 된 경우). 값이 낮을수록 관절이 작업과 더 밀접하게 일치하지만 계산을 위해 더 많은 단계가 필요합니다.
Translate Root: IK를 해결할 때 체인 루트 항목을 이동할 수 있는지 여부를 지정합니다 (활성화 된 경우).
Weight: 활성화 할 때 체인 루트가 얼마나 자유롭게 이동하는지 제어합니다 Translate Root. 제로 (0)는 움직이지 않지만 1.0 자유롭게 움직일 수 있습니다. 이 설정을 1보다 높이면 루트 이동의 가능성이 훨씬 높아집니다.
조인트 설정
Joint—
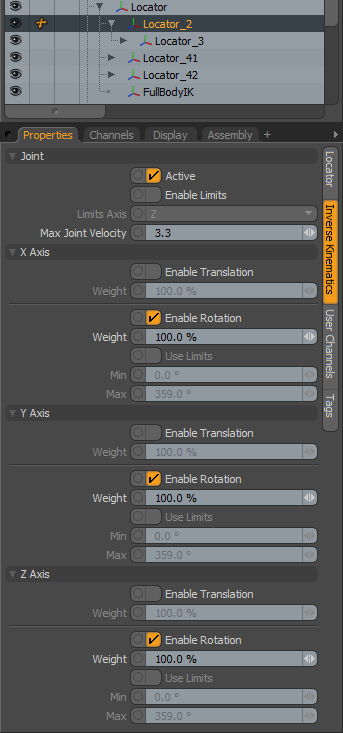
Active: 관절이 IK 해석의 영향을 받는지 여부를 지정합니다 (활성화 된 경우). IK를 무시하도록하려면이 옵션을 비활성화하십시오.
Enable Limits: IK 시스템의 조인트에서 한계를 활성화할지 여부를 지정합니다. 각 축에서 회전을 제한하기 위해 관절에 제한이있을 수 있습니다.
Limits Axis: 설정된 제한에 대한 조인트 축을 지정합니다. 조인트에 한계를 설정할 때 사용합니다. 일반적으로 이것은 관절의 첫 번째 하위 관절을 가리키는 축이며 일반적으로 IK 세그먼트를 따라 실행되는 축입니다.
Max Joint Velocity: IK 솔버의 각 반복에 대해 조인트가 만들 수있는 회 전량을 조정합니다. 값이 클수록 조인트가 더 많이 회전 할 수 있습니다. 매우 간단한 체인 (예 : 2 세그먼트 암 또는 레그)의 경우 회전을 분산시킬 조인트가 적으므로이 설정을 늘리십시오. 보다 복잡한 체인에서는이를 사용하여 목표 나 작업이 멀리 떨어져있을 때 발생할 수있는 지터를 줄입니다.
X/Y/Z Axis—
세 축 각각은 평행 이동 및 회전을 활성화 또는 비활성화하고 이동량을 제한 할 수있는 동일한 옵션을 제공합니다.
Enable Translation: 관절의 자식이 목표에 도달하는 동안 현재 관절의 지정된 축으로 이동할 수 있습니다 (활성화 된 경우) (체인 루트에는 적용되지 않음).
Weight: 공동 번역 양을 제어합니다. 0% 움직임을 비활성화하고 100% 완전한 움직임을 허용합니다. 특히 여러 개의 관절이있는 경우 이동 가능성을 높이기 위해 값을 100 % 이상으로 높일 수 있습니다 Translation 가능.
Enable Rotations: 지정된 축에서 회전을 토글합니다.
Weight: 지정된 축 주위의 회전 자유를 조정합니다. 에서 0% 관절이 회전하지 않습니다. ...에서 100% 완전히 회전 할 수 있습니다. 이 값을 100 % 이상으로 올리면이 축이 회전 할 가능성이 높아집니다.
Use Limits: IK가 지정된 값 내에서만 회전하도록 강제 설정하고 (활성화 된 경우) Min 또는 Max 값.
Min/Max: 관절이 회전 할 수있는 범위를 결정합니다. Modo 사용하도록 설정 한 경우에만 이러한 제한을 사용합니다 Use Limits.
작업 옵션
관절에 목표를 추가하면 Modo 추가 Task 목표 관절에 대한 옵션을 통해 관절 방향이 목표를 향해 도달하는 방식을 조정할 수 있습니다. 작업은 위치 또는 회전 (또는 둘 다)을 유지하기 위해 관절에 지시하기 때문에 목표와 관련이 있습니다. 대한 Position TaskIK 솔버는 작업을 추가 할 때 항목이 있던 월드 위치에 체인 항목을 유지하려고 시도합니다. 대한 Rotation TaskIK 솔버는 작업을 추가 할 때와 동일한 월드 방향으로 체인 항목을 유지하려고합니다.
Position Task—
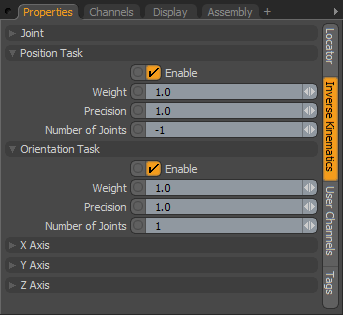
Enable: 작업이 현재 활성화되어 있는지 여부를 제어합니다.
Weight: 작업이 체인에 미치는 영향을 결정하는 작업의 강도를 지정합니다. 체인에 여러 작업이있는 경우이를 사용하여 특정 작업이 솔루션에 어느 정도 영향을 미치도록 할 수 있습니다.
Precision: 솔버가 관절을 작업에 얼마나 가깝게 일치 시키려고하는지 제어합니다.
Number of Joints:이 작업이 영향을 미치는 루트를 향한 관절 수를 지정합니다. 로 설정 -1 모든 관절에 영향을 미칩니다.
Orientation Task—
Enable: 작업이 현재 활성화되어 있는지 여부를 제어합니다.
Weight: 작업이 체인에 미치는 영향을 결정하는 작업의 강도를 지정합니다. 체인에 여러 작업이있는 경우이를 사용하여 특정 작업이 솔루션에 어느 정도 영향을 미치도록 할 수 있습니다.
Precision: 솔버가 관절을 작업에 얼마나 가깝게 일치 시키려고하는지 제어합니다.
Number of Joints:이 작업이 영향을 미치는 루트를 향한 관절 수를 지정합니다. 로 설정 -1 모든 관절에 영향을 미칩니다.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로에 대한 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.