전신 IK 설정
애니메이션에는 두 가지 방법이 있습니다 계층 요소 (예 : 테이블의 객체에 캐릭터의 팔이 닿는 위치) : 정역학 (FK) 및 역 역학 (IK).
FK를 사용하면 루트 요소를 배치 한 다음 체인 아래의 모든 요소를 조정하여 애니메이션을 설정합니다. 먼저 어깨 관절, 팔꿈치 및 손목을 배치합니다. 손을 물건에 올바르게 놓으려면 몇 번만 시도하면됩니다.
IK는 반대로 작동하며 훨씬 직관적입니다. IK를 사용하여 손을 선택하고 물체로 옮깁니다. 손목, 팔꿈치 및 어깨 관절은 목표 (이 경우 손)를 향한 올바른 방향을 유지하도록 자동으로 조정됩니다.
Modo 상당히 자동적이고 매우 견고한 IK 시스템이 있습니다. 풀 바디 IK는 다양한 리깅 상황에서 작동하는 자동 IK 시스템입니다. 일반적으로 문자에 사용되지만 로케이터 기반 항목의 모든 계층 구조 체인에 적용 할 수 있습니다. 대상 요소를 선택하고 명령을 적용하여 체인을 설정합니다 의 도구 상자에서 발견 Setup 과 Animate 의 인터페이스 탭 Inverse Kinematics 하위 탭.
IK 할당
![]()
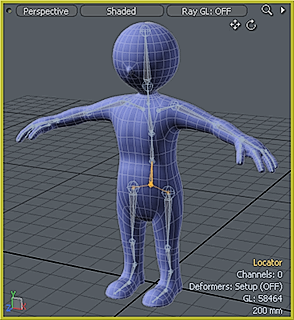
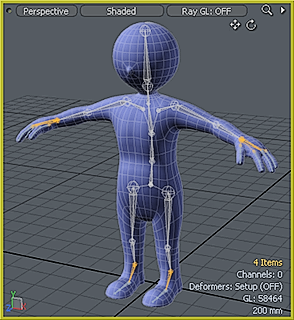
에서 IK를 사용하려면 Modo먼저 작업하려는 항목에 IK를 할당해야합니다. 당신은 이것을 Setup 각 관절의 나머지 위치를 정의하는 모드입니다. 항목 계층 구조 또는 전체에 IK를 적용 할 수 있습니다. 해골 — 바인딩 프로세스 전 또는 후에.
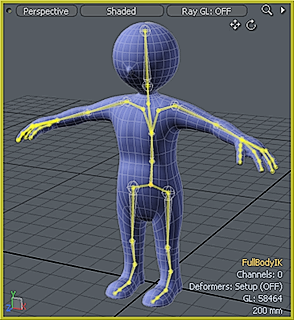
IK를 전체 계층에 할당하려면 뿌리 체인의 항목을 클릭하고 Assign IK 단추. Modo 루트에서 바깥쪽으로 계층 구조의 모든 항목에 IK를 할당합니다.
|
를 선택하십시오 Root 계층의 요소 |
Apply IK 체인 전체에 IK를 적용 |
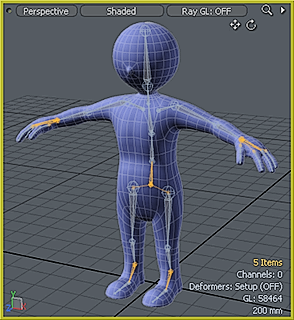
계층 구조의 일부에만 IK를 할당하려면 먼저 루트 항목을 선택하십시오. 그런 다음 IK가 종료되는 추가 항목을 선택하십시오. 마지막으로 Assign IK 단추.
|
를 선택하십시오 Root 과 Terminating 집단 |
Modo 선택한 요소 사이에 IK를 적용합니다 |
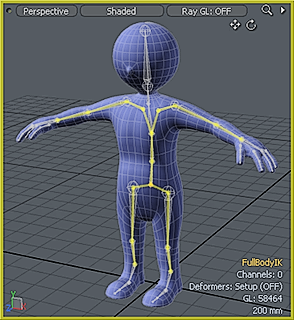
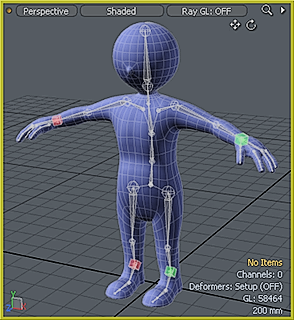
이런 식으로 IK를 할당하면 Modo 종료 요소의 선택을 유지합니다. 그런 다음 Add Goal 단추. 이제 네가 체인은 목표를 향한 위치와 회전을 조정합니다. 그런 다음 종료 할 수 있습니다 Setup 체인을 위치시키기 시작합니다.
|
종료 요소는 선택된 상태로 유지 |
그만큼 Add Goal 버튼은 각 종료 요소에 목표를 추가합니다 |
체인의 모든 항목은 동일한 계층 구조의 일부 여야하며 모든 항목은 3D 로케이터 유형 항목 (예 : 스켈레톤 도구, 로케이터 또는 메쉬 항목으로 만든 관절)이어야합니다. 만약 Modo 계층 구조에 다른 유형의 항목이 있거나 다른 IK 체인이있는 경우 IK 프로세스 해당 항목에서 종료됩니다. 크기가 조정 된 항목이있는 모든 계층 구조에는 IK를 지정하기 전에 크기가 고정되어 있어야합니다. IK와 함께 한정된, Modo IK 솔버를 만들고 루트 항목에 부모를 만듭니다 (FullBodyIK). 이 아이템은 체인의 전반적인 동작을 제어하는 설정을 가지고 있으며, 이는 아이템의 Properties 선택된 경우 패널. (자세한 내용은 전신 IK 이야기.)
목표
IK 체인이 정의 된 경우 FK (정방향 운동학)는 여전히 대상 요소를 직접 제어하며 체인의 각 항목을 개별적으로 변환 할 수 있습니다. 추가하여 Goals 과 Tasks, 당신은 자동으로 IK를 활성화. (목표는 IK 체인을 구동하는 항목에 대한 일반적인 용어입니다. 목표 항목을 조작하면 IK 체인의 항목 회전이 변경되어 최종 항목의 위치 또는 회전이 목표 항목의 위치 또는 회전과 일치하도록 변경됩니다.) IK 체인에 속하는 모든 항목에 목표 항목을 추가 할 수 있습니다 ( 체인 루트)와 여러 목표를 가질 수 있습니다. IK 솔버는 모든 목표를 충족시키는 최상의 솔루션을 찾으려고합니다.
![]()
목표를 추가하려면 목표를 향해 움직여야하는 체인 부분을 나타내는 IK 체인의 항목을 선택하십시오 (예 : 팔의 손 / 손목 조인트로 FK가 손가락을 제어하도록 함). 그런 다음 Add Goal IK 툴바의 버튼을 클릭하십시오. Modo 선택한 체인 항목의 위치와 방향에 작은 입방체 항목 (로케이터 모양으로)을 배치하고 위치와 방향을 추가합니다 업무 선택한 조인트에 연결하고 채널 링크와 함께 올바르게 연결합니다. 큐브에는 식별을 돕기위한 초기 사용자 정의 색상이 있습니다. 즉, 양의면은 녹색이고 음의면은 빨강입니다.
![]()
목표로 사용할 기존 항목이있는 경우 Assign Goal 체인에 연결하는 명령입니다. 목표로 사용할 아이템과 목표로 사용할 아이템을 선택하십시오 (순서대로). 다음 중 하나를 선택하십시오 Assign Goal 마우스 오른쪽 버튼을 클릭하여 Assign Goal 단추. 이 명령을 사용하면 항목을 Position Goal, Orientation Goal , 아니면 둘다.
![]()
목표 항목을 삭제 한 다음 목표가 연결된 체인 항목을 선택하고 목표 항목을 제거하여 목표 항목을 제거합니다. Tasks IK 툴바의 버튼을 사용하여
작업
체인에 할당 된 IK는 당신은 추가 Tasks 체인의 하나 이상의 항목에. 작업은 위치, 회전 또는 둘 다를 유지하기 위해 관절에 대한 지침이므로 목표와 관련됩니다. 대한 Position Task IK 솔버는 작업이 추가 될 때 항목이 있던 월드 위치에 체인 항목을 유지하려고 시도합니다. 대한 Rotation TaskIK 솔버는 작업이 추가 될 때와 동일한 월드 방향으로 체인 항목을 유지하려고합니다. Modo 구현하다 Tasks 조인트에 추가 된 채널 그룹으로각 작업에는 FK 채널 세트와 매트릭스 채널이 있습니다. 이러한 채널을 사용하여 월드 공간에서 작업 변환을 설정하므로 수정 자, 채널 링크 또는 기타 수단 그들을 운전할 수 있습니다. 체인의 여러 항목에 작업을 추가 할 수 있습니다. 그렇게하면 IK 솔버는 체인의 모든 작업을 만족시킬 수있는 최상의 솔루션을 찾습니다. 항목의 체인 항목에서 각 작업에 대한 설정을 찾을 수 있습니다. Properties 패널.
![]()
할당하려면 Position Task, 대상 관절을 선택하고 Add Position Task 단추. Modo 에서 위치 작업 옵션을 관절의 속성에 추가합니다. Properties 조인트를 선택할 때 패널.
![]()
할당하려면 Orientation Task, 대상 관절을 선택하고 Add Orientation Task 단추. Modo 추가 오리엔테이션 작업 옵션을 관절의 속성에 추가합니다. Properties 조인트를 선택할 때 패널.
체인에 추가
체인을 사용하여 체인에서 요소를 추가하거나 제거 할 수 있습니다 Add 과 Remove 버튼.
![]()
기존 체인에 조인트 또는 조인트 체인을 추가하려면 새 요소가 동일한 계층의 일부 여야합니다. 요소를 추가하는 한 가지 방법은 대상 체인에서 루트 항목을 선택한 다음 Skeleton 수단. 그런 다음 체인에서 상위 요소를 선택하고 해당 요소를 클릭하여 실제 조인트를 그리면 추가 조인트가 생성 될 때 계층 구조에 추가됩니다.
두 번째 방법은 육아 옵션을 사용하여 관절 (또는 관절 체인)을 대상 체인의 계층 구조에 수동으로 부모로 지정하는 것입니다. 드롭 액션 (특히 Parent 과 Parent in Place 옵션). 항목을 기본 계층의 일부로 만들면 새 체인의 요소 또는 기준을 선택하고 Add to Chain 단추.
![]()
조인트 또는 조인트 체인을 제거하려면 제거 할 기본 요소를 선택하고 Remove from Chain 단추.
체인 조절
![]()
무릎 또는 팔꿈치 관절 위치 변경과 같은 체인 부분을 조정해야 할 수도 있습니다. 이 조정 유형은 Setup 방법. 때 Setup 모드에서 관절을 조정 한 다음 Update Rest Pose 버튼을 클릭하여 IK 체인을 업데이트합니다. 작업을 수행하는 목표 항목의 위치 나 방향을 업데이트해야 할 수도 있습니다. 경기 위치 또는 경기 회전 버튼 Setup 툴바의 탭. 목표에 따라 업무를 추진하지 않는 경우, 업무 채널의 가치와 일치하도록 체인 자체가 업데이트됩니다. 설정에 따라 수동으로 편집해야 할 수도 있습니다.
IK 제거
![]()
계층 구조에서 IK를 제거 할 수 있습니다. FullBodyIK 항목을 클릭하고 Remove IK 역 운동학 도구 상자의 버튼을 클릭합니다. Modo 각 항목에서 IK 설정을 제거하고 FullBodyIK 장면에서 솔버 항목.
평면 IK
Planar IK 솔버는 2 개 또는 3 개의 로케이터 조인트를 처리 할 수 있습니다. 듀얼 IK 솔버와 유사하게, 목표 로케이터를 배치함으로써 조인트는 위치에 가장 적합한 위치에있게됩니다.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로에 대한 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.