평면 IK
역 운동학 (IK)은 소프트웨어가 관절의 굽힘을 계산하는 항목에 애니메이션을 적용하는 방법입니다. 목표 객체의 위치를 기준으로합니다. 에 Modo목표 개체는 일반적으로 로케이터입니다. 일련의 항목에 IK를 설정하면 목표 항목이 움직일 때 IK 계층 구조로 인해 항목이 계속 목표에 도달하여 필요에 따라 관절 회전이 수정됩니다.
IK를 사용하면 여러 개별 항목의 회전을 애니메이션하는 것보다 하나의 항목 (목표)의 위치를 애니메이션하는 것이 훨씬 쉽습니다. 예를 들어, IK를 사용하여 손잡이에 손을 움직이려면 목표를 문 손잡이에 놓고 손이 장면에서 적절한 위치에 있어야합니다. 표준 계층 구조를 사용하면 어깨와 팔꿈치를 독립적으로 회전하여 손의 올바른 위치를 찾으십시오.
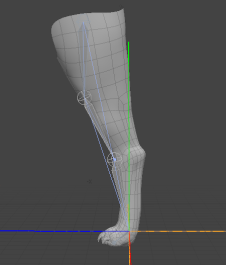
ModoPlanar IK 시스템은 이전 예에서 언급 한 팔과 같은 이중 조인트에 적합하지만 동물의 다리와 같은 3 개의 로케이터 조인트에 애니메이션을 적용 할 수 있습니다.
노트 : 당신은 또한 더 강력한 고려할 수 있습니다 전신 IK 전체 캐릭터를 조작 할 수 있습니다.
로케이터 체인에 IK 적용
항목 체인에 IK를 적용하려면 먼저 계층 구조를 만듭니다.
• 내림차순 체인에서 항목을 서로 부모로 지정하십시오.
• 중앙 위치도 올바른 위치에 있는지 확인하십시오. 에 대한 Modo IK를 올바르게 계산하려면 모든 중심 위치가 동일한 평면에 나타나도록 하나 이상의 축 값을 공유해야합니다.
• 체인이 구부러 졌는지 확인하십시오. Modo IK를 적용하면 굽힘에 선호되는 각도를 사용할 수 있습니다.
팁: 3D 뷰포트에서 오버레이 도면을 활성화하여 메시 내에 조인트를 표시합니다.
| 1. | 항목이 순서대로 정렬되면 내림차순으로 항목을 선택하십시오. |
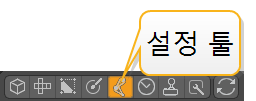
| 2. | 설정 모드를 클릭하여 설정 모드로 들어갑니다. |
3D 뷰포트 주위에 노란색 프레임이 나타나 설정 모드에 있음을 나타냅니다.
노트 : 설정 모드 사용에 대한 자세한 내용은 다음을 참조하십시오. 바인딩 및 설정 모드.
| 3. | 설정 툴바에서 Inverse Kinematics 탭과 아래 Planar IK을 클릭하십시오 Apply IK 단추. |
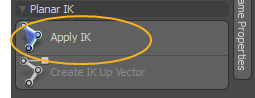
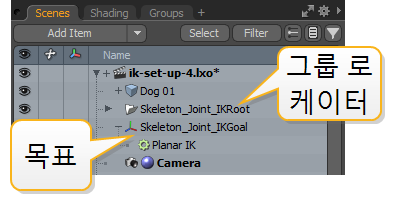
IK 수정자를 체인에 적용하면 목표 항목이 생성되고 그룹 로케이터가 IK 체인의 전체 상위로 추가됩니다.
노트 : 관절이 축을 공유하지 않으면 경고가 표시됩니다. 딸깍 하는 소리 OK X 축을 따라 항목을 정렬합니다.
| 4. | 설정 모드를 종료하십시오. |
목표 항목을 이동하면 Modo IK 체인의 조인트 각도를 수정합니다.
현재 IK 위치에 FK 일치
목표 항목을 이동하고 FK (Forward Kinematics)가 해당 위치와 일치하도록하려면 현재 IK 위치를 사용하도록 FK를 설정할 수 있습니다.
| 1. | 목표 로케이터를 선택하십시오 ( Skeleton_Joint_IKGoal 기본적으로) 항목 목록에서 원하는 위치로 이동하십시오. |
| 2. | 목표 항목을 선택하면 Planar IK 속성이 Properties 탭. 클릭 Set FK to Current button. |
| 3. | 설정하여 IK 비활성화 Blend 0 %까지 |
조인트 체인의 시작 위치가 새 위치로 이동합니다.
IK와 FK 일치
체인을 사용하여 체인을 시작 위치로 재설정 할 수 있습니다 Reset Solver 에서 IK 버튼에서 Properties. 예를 들어 개별 관절 편집으로 돌아갈 수 있습니다.
| 1. | 목표 항목을 선택하십시오 항목 목록에서 Properties 오른쪽 하단의 탭. |
| 2. | 클릭 Reset Solver from IK 단추. |
IK 솔버 및 조인트 체인이 시작 위치로 재설정됩니다.
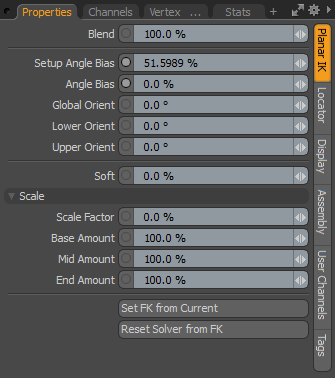
평면 IK 속성
에서 목표 항목 선택 Item List IK 체인과 관련된 속성을 표시합니다.
|
Blend |
100 % 설정 IK 솔루션을 완전히 사용합니다. 100 % 미만의 값은 체인에 대한 IK의 영향을 줄이고 0 %로 설정하면 비활성화됩니다. |
|
Setup Angle Bias |
체인의 휴지 상태를 지정합니다. 이 설정은 체인의 조인트에 대한 기본 동작을 제공하도록 설정 모드에서 조정해야합니다. |
|
Angle Bias |
체인의 시작 또는 끝을 향한 조인트 가중치를 제어합니다. 설정 모드를 종료 한 후 Angle Bias 특정 애니메이션에 대한 체인의 동작을 변경하는 옵션입니다. 이 금액은 Setup Angle Bias. 그래서 당신이 있다면 Setup Angle Bias 50 %의 Angle Bias 관절 각도에 사용되는 전체 바이어스는 10 %로 60 %입니다. 별도의 컨트롤을 사용하면 애니메이션 바이어스에 대한 변경 사항을 다시 실행할 필요없이 설정 모드에서 체인을 조정할 수 있습니다. 노트 : Angle Bias 세 조인트 체인에만 사용할 수 있습니다. |
|
Global Orient |
IK 체인의 평면 방향 각도를 지정합니다. 예를 들어 팔의 경우 팔꿈치가 향하는 각도를 조정할 수 있습니다. |
|
Lower Orient |
3 관절 체인의 하단 2 개 관절의 평면 방향 각도를 지정합니다. 노트 : Lower Orient 세 조인트 체인에만 사용할 수 있습니다. |
|
Upper Orient |
3 조인트 체인의 상단 두 조인트의 평면 방향 각도를 지정합니다. 노트 : Upper Orient 세 조인트 체인에만 사용할 수 있습니다. |
|
Soft |
관절을 과도하게 연장하면 기본적으로 목표 위치에 스냅됩니다. 이 값을 늘리면 스냅이 제거되고 전환 속도가 느려집니다. |
|
Scale |
|
|
Scale Factor |
목표 지점이 관절 길이의 합에서 너무 멀면 IK 솔버는 목표 위치에 맞게 관절을 스케일링 할 수 있습니다. 0 %는 스케일링이 없음을 의미하고 100 %에서는 조인트가 완전히 스케일링됩니다. 그만큼 Base, Mid , End Amount 설정을 통해 관절 전체의 스케일 양 분포를 결정할 수 있습니다. |
|
Base Amount |
첫 번째 관절 만 확장합니다. |
|
Mid Amount |
가운데 관절 만 확장합니다. |
|
End Amount |
마지막 관절 만 확장합니다. |
|
Set FK from Current |
FK를 IK의 현재 위치와 일치시킵니다. 이 작업을 수행하는 방법에 대한 자세한 내용은 현재 IK 위치에 FK 일치. |
|
Reset Solver from FK |
체인에서 IK를 제거하고 관절을 개별적으로 편집 할 수 있습니다. 이 작업을 수행하는 방법에 대한 자세한 내용은 IK와 FK 일치. |
IK Up 벡터 생성
이 벡터는 IK 구속 조건의 위쪽 방향을 정의하며 애니메이션 중에 체인의 방향을 올바르게 유지하는 데 도움이됩니다. 그만큼 Create IK Up Vector 버튼은 벡터를 할당 명령 로케이터를 생성하고 배치 할 필요가 없다는 점을 제외하고. 와 Create IK Up Vector, Modo 원하는 굽힘 각도에 따라 로케이터를 자동 생성합니다. 새로운 Up Vector 로케이터가 사용 가능 해지면 애니메이션 처리하여 IK 리그의 방향을 조정할 수 있습니다. 이것은 조정하는 것과 비슷합니다. Global Orient IK 설정 Properties 패널. IK Up Vector와 Global Orient 필요한 오리엔테이션을 생성합니다.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로에 대한 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.