무엇을 출력할지 선택
출력 대상을 선택하려면
| 1. | DepthGenerator 속성에서 Depth Output 생성하려는 깊이 맵 유형을 선택하려면 : |
• Depth (1/Z) -출력 1 / Z. 여기서 Z는 카메라의 Z 축 거리입니다. 이것은 ScanlineRender 노드의 깊이 출력과 일치합니다.
이 모드를 사용하면 나중에 3D 공간에 위치하고 심도 채널에 따라 변위 된 카드로 그룹 노드를 만들 수 있습니다.
• Distance -카메라 중심에서 3D 표면 점까지의 광선을 따라 거리를 출력합니다.
아래 그림에서 각 픽셀은 광선을 형성하고 AB는 카메라에서 3D 점까지의 물리적 거리를 측정하고 AC는 카메라의 Z 축을 따라 거리를 측정합니다.
|
|
| 깊이 계산. |

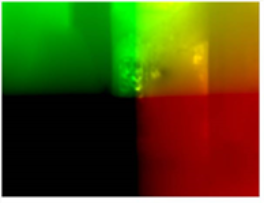
| 2. | 위치 패스로 깊이를 출력하려면 다음을 설정하십시오. Surface Point 이 채널을 저장하려는 채널 (예 : ppass채널이 포함 된 X , Y , Z). |
위치 패스에는 이미지의 각 픽셀에 대한 X, Y 및 Z 좌표가 포함됩니다. Relight 노드 또는 PositionToPoints 노드와 함께 사용하여 깊이를 점 구름으로 시각화 할 수 있습니다.
|
|
| 포지션 패스. |
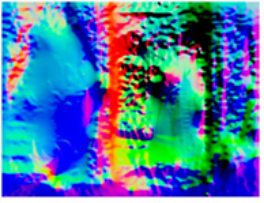
| 3. | 마찬가지로 법선이 통과 할 때 깊이를 출력하려면 Surface Normal 법선 패스를 저장하려는 채널에 (예 : npass채널이 포함 된 X , Y , Z). |
법선 패스에는 이미지의 각 픽셀에 대해 X 방향, Y 방향 및 Z 방향의 세 가지 벡터 정보가 포함됩니다. 즉, 이미지의 각 포인트가 향하는 방향을 저장합니다. 조명 노드에 법선 패스를 사용할 수 있습니다.
|
|
| 법선이 통과합니다. |
| 4. | 로 진행 깊이 분석 이하. |
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.