포인트 클라우드 필터링
포함 된 포인트의 수와 품질을 조정하여 포인트 클라우드를 필터링 할 수 있습니다. NukeX 재 계산없이 추적 된 포인트 클라우드를 직접 필터링하여 워크 플로우를 간소화합니다.
| 1. | 확인하십시오 Display rejected points 3D 뷰어를 동적으로 업데이트하도록 임계 값 컨트롤을 활성화하고 조정합니다. 거부 된 트랙은 빨간색으로 강조 표시됩니다. |
| 2. | 조정 AngleThreshold 최소 허용 각도를 설정하여 3D 점을 삼각 측량합니다 (도). 삼 각각이 큰 점이 더 정확한 경향이 있습니다. |
임계 값 설정 0 모든 포인트를 삼각 측량하거나 임계 값을 증가시켜 가장 정확한 포인트를 강조 표시합니다.
팁: 경험적으로 5도 이하의 것은 잘못되었을 가능성이 있습니다.
| 3. | 조정 DensityThreshold 허용 가능한 최소 점 밀도를 설정합니다. 고립 된 지점은 정확성이 떨어지는 경향이 있습니다. |
임계 값 설정 0 가장 고립되고 덜 정확한 점을 강조하기 위해 모든 점을 출력하거나 임계 값을 증가시킵니다.
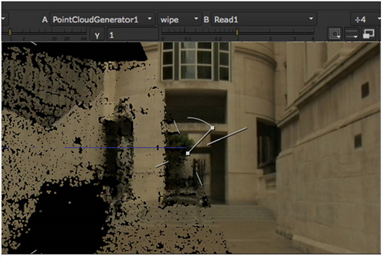
| 4. | 뷰어 wipe 도구를 사용하면 2D 소스 푸티지를 포인트 클라우드와 비교하여 격리 된 포인트를 찾을 수 있습니다. |
입력 A를 PointCloudGenerator 노드로 설정하고 입력 B를 소스 이미지의 읽기 노드로 설정하십시오.
보다 뷰어 컨트롤 사용 자세한 내용은.
| 5. | 로 진행 거부 된 포인트 제거. |
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.